04 Delete Relaxation
Slides
This module is also available in the following versions
Motivation
Introduction to Relaxation
Delete relaxation is a method to relax planning tasks and automatically compute a heuristic function \(h\)
Delete relaxation is a widely used heuristic, highly successful for satisficing planning
Note that every \(h\) function typically yields good performance in only in some domains (balancing search reduction versus computational overhead).
- Therefore we aim for multiple alternative relaxation methods, depending upon domain
Relaxation Types
Four known types of relaxation that generate heuristics include
- Critical path heuristics
- Delete relaxation (covered in this Module)
- Abstractions
- Landmarks
Relaxing the World by Ignoring Delete Lists








The Delete Relaxation
The Delete Relaxation
The “\(^+\)” super-script denotes delete relaxed states encountered in the relaxed version of the problem, e.g. \(s^+\) is a fact set just like \(s\).
- The “\(^+\)” symbol is chosen to capture the additive (monotone) aspect of delete relaxed planning problems.
The Relaxed Plan
Question: Do you recall what \(\Pi_s\) is?:
- \(\Pi_s = (F,A,c,{\color{red}s},G)\)
A Relaxed Plan for “TSP” in Australia

Initial state: \(\{\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\}\)
Apply \(\mathit{drive}(\mathit{Sy},\mathit{Br})^+\): \(\{\mathit{at}(\mathit{Br}), \mathit{v}(\mathit{Br}),\) \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\}\)
Apply \(\mathit{drive}(\mathit{Sy},\mathit{Ad})^+\): \(\{\mathit{at}(\mathit{Ad}), \mathit{v}(\mathit{Ad}),\) \(\mathit{at}(\mathit{Br}), \mathit{v}(\mathit{Br}),\) \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\}\)
Apply \(\mathit{drive}(\mathit{Ad},\mathit{Pe})^+\): \(\{\mathit{at}(\mathit{Pe}), \mathit{v}(\mathit{Pe}),\) \(\mathit{at}(\mathit{Ad}), \mathit{v}(\mathit{Ad}),\) \(\mathit{at}(\mathit{Br}), \mathit{v}(\mathit{Br}),\) \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\}\)
Apply \(\mathit{drive}(\mathit{Ad},\mathit{Da})^+\): \(\{\mathit{at}(\mathit{Da}), \mathit{v}(\mathit{Da}),\) \(\mathit{at}(\mathit{Pe}), \mathit{v}(\mathit{Pe}),\) \(\mathit{at}(\mathit{Ad}), \mathit{v}(\mathit{Ad}),\) \(\mathit{at}(\mathit{Br}), \mathit{v}(\mathit{Br}),\) \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\}\)
State Dominance
Definition of State Dominance
For example, on the previous slide, what state dominates what? Each state along the relaxed plan dominates the previous one, because the actions don’t delete any facts.
Proof: (i) is trivial. (ii) by induction over the length \(n\) of \(\vec{a}^+\). The base case \(n=0\) is trivial. The inductive case \(n \rightarrow n+1\) follows directly from the induction hypothesis and the definition of \(appl(.,.)\). In a delete=relaxed setting it is always better to have more facts true.
The Delete Relaxation & Admissibility
Proof. Trivial from the definitions of \(appl(s,a)\) and \(a^+\).
Optimal relaxed plans admissibly estimate the cost of optimal plans
Applying a relaxed action can only ever make more facts true ((i) from Action Dominance proposition above).
this can only be good, i.e. it cannot render a task unsolvable (dominance proposition)
It also means the relaxed plan can only be shorter, and hence is an (admissible) bound on how good the optimal plan could be (never over-estimates).
Proof: Prove by induction over the length of \(\vec{a}\) that \(appl(s,\vec{a}^+)\) dominates \(appl(s,\vec{a})\). Base case is trivial, inductive case follows from (ii) above.
Can you think of a method (greedy is OK) to find a relaxed plan?: We could keep applying relaxed actions, and only stop if the goal is true.
Relaxed Planning Methods
Greedy Relaxed Planning
Proposition Greedy relaxed planning is sound, complete, and terminates in time polynomial in the size of \(\Pi\).
Proof: Soundness: If \(\vec{a}^+\) is returned then, by construction, \(G \subseteq appl(s,\vec{a}^+)\). Completeness: If “\(\Pi_s^+\) is unsolvable” is returned, then no relaxed plan exists for \(s^+\) at that point; since \(s^+\) dominates \(s\), by the dominance proposition this implies that no relaxed plan can exist for \(s\). Termination: Every \(a \in A\) can be selected at most once because afterwards \(appl(s^+,a^+) = s^+\).
- It is easy to decide whether a relaxed plan exists!
Greedy Relaxed Planning to Generate a Heuristic Function?
Is this heuristic safe?:
- Yes: \(h(s)=\infty\) only if no relaxed plan for \(s\) exists, which by admissibility of delete relaxation implies that no plan for \(s\) exists.
Is this heuristic goal-aware?
- Yes, we’ll have \(G \subseteq s^+\) right at the start.
Is this heuristic admissible?
- No. It would be if relaxed plans were optimal; but clearly aren’t. So \(h\) isn’t consistent either.
To be informed (accurately estimate \(h^*\)), a heuristic must approximate the minimum effort needed to reach the goal. Greedy relaxed planning cannot be guaranteed to use minimum effort because it may select arbitrary actions that aren’t relevant at all.
\(h^+\): The Optimal Delete Relaxation Heuristic
\(h^+\) naturally approximates the minimum effort by asking for the cheapest possible relaxed plans.
You might rightfully ask: But won’t optimal relaxed plans usually under-estimate \(h^*\)?
Yes, but that is just the definition of admissibility in the relaxed problem: it must never over estimates the true cost of the problem.
Arbitrarily adding actions greedily that are useless within the relaxation does not help to address it.
\(h^+\) in the TSP: Difference between \(h^*\) and \(h^+\)
\(P\): \(\mathit{at}(X)\) for \(X \in \{\mathit{Sy}, \mathit{Ad}, \mathit{Br}, \mathit{Pe}, \mathit{Ad}\}\); \(\mathit{v}(X)\) for \(X \in \{\mathit{Sy}, \mathit{Ad}, \mathit{Br}, \mathit{Pe}, \mathit{Ad}\}\).
\(A\): \(\mathit{drive}(X,Y)\) where \(X,Y\) have a road. \[ c(\mathit{drive}(X,Y)) = \left \{ \begin{array}[]{ll} 1 & \{X,Y\} = \{\mathit{Sy}, \mathit{Br}\}\\ 1.5 & \{X,Y\} = \{\mathit{Sy}, \mathit{Ad}\}\\ 3.5 & \{X,Y\} = \{\mathit{Ad}, \mathit{Pe}\}\\ 4 & \{X,Y\} = \{\mathit{Ad}, \mathit{Da}\} \end{array} \right. \]
\(I\): \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\); \(G\): \(\mathit{at}(\mathit{Sy}), \mathit{v}(X) \text{ for all } X\).
Planning versus Relaxed Planning:
Optimal plan: \(\langle \mathit{drive}(\mathit{Sy},\mathit{Br})\), \(\mathit{drive}(\mathit{Br},\mathit{Sy})\), \(\mathit{drive}(\mathit{Sy},\mathit{Ad})\), \(\mathit{drive}(\mathit{Ad},\mathit{Pe})\), \(\mathit{drive}(\mathit{Pe},\mathit{Ad})\), \(\mathit{drive}(\mathit{Ad},\mathit{Da})\), \(\mathit{drive}(\mathit{Da},\mathit{Ad})\), \(\mathit{drive}(\mathit{Ad},\mathit{Sy}) \rangle\).
Optimal relaxed plan: \(\langle \mathit{drive}(\mathit{Sy},\mathit{Br})\), \(\mathit{drive}(\mathit{Sy},\mathit{Ad})\), \(\mathit{drive}(\mathit{Ad},\mathit{Pe})\), \(\mathit{drive}(\mathit{Ad},\mathit{Da}) \rangle\).
\({\color{blue}h^{*}(I)=}\) \(20\); \({\color{blue}h^+(I)=}\) \(10\).
\(h^+\) in the TSP: What problem does this remind you of?

Towers of Hanoi: \(h^+\) can underestimate a lot!

\(h^+\)(Hanoi) \(= O(n)\), as opposed to problem complexity of \(O(2^n)\) (the shortest plan which solves the problem can be exponential)
But how do we Compute \(h^+\)?
Note. By computing \(h^+\), we would solve PlanOpt\(^+\).
Theorem: Optimal Relaxed Planning is Hard
Proof. Membership: Guess action sequences of length \(|A|\) — in a relaxed plan, each action is applied at most once!
Hardness: by reduction from SAT.
For each variable \(v_i \in \{v_1, \dots, v_m\}\) in the CNF, three facts \(\mathit{v}_i\), \(\mathit{notv}_i\), and \(\mathit{setv}_i\); for each clause \(c_j \in \{c_1, \dots, c_n\}\) in the CNF, one fact \(\mathit{satc}_j\).
Actions {\(\mathit{setvtrue}_i : (\emptyset,\{\mathit{v}_i,\mathit{setv}_i\},\emptyset)\)} and {\(\mathit{setvfalse}_i : (\emptyset,\{\mathit{notv}_i,\mathit{setv}_i\},\emptyset)\)}.
Actions {\(\mathit{makesatc}_j : (\{\mathit{v}_i\},\{\mathit{satc}_j\},\emptyset)\)} where \(v_i\) appears positively in clause \(c_j\); and {\((\{\mathit{notv}_i\},\{\mathit{satc}_j\},\emptyset)\)} where \(v_i\) appears negatively in clause \(c_j\).
Initial state \(\emptyset\), goal \(\{\mathit{setv}_1, \dots, \mathit{setv}_m, \mathit{satc}_1, \dots, \mathit{satc}_n\}\); {\(B := m+n\)}.
\(h^+\) as a Relaxation Heuristic for STRIPS Planning tasks

where, for all \(\Pi \in \mathcal P\), \(h^*(r(\Pi)) \leq h^*(\Pi)\).
For \(h^+ = h^* \circ r\):
Problem \(\mathcal P\): All STRIPS planning tasks.
Simpler problem \(\mathcal P'\): All STRIPS planning tasks with empty deletes.
Perfect heuristic \(h^{\prime *}\) for \(\mathcal P'\): Optimal plan cost \(= h^*\) on \(\mathcal P'\).
Transformation \(r\): Drop the deletes.
Is this a native relaxation? Yes.
Is this relaxation efficiently constructible? Yes.
Is this relaxation efficiently computable? No.
How to Relax if not efficiently computable? Approximate
The delete relaxation heuristic we want is \(h^+\).
- Unfortunately, this is hard to compute so the computational overhead is very likely to be prohibitive.
All implemented systems are using the delete relaxation approximate \(h^+\) in one or the other way.
- We now look at the the most wide-spread approaches to do so.
Indiana Jones’ Maze Domain?

(A): No, relaxed plans can’t walk through walls.
(B): Yes, optimal plan = shortest path = relaxed plan (deletes do not matter because “shortest paths never walk back”).
(C), (D): No, relaxed plans must move both horizontally and vertically.
The Additive and Max Heuristics
The Additive Heuristics
The Max Heuristics
The Additive and Max Heuristics: Properties
Both \(h^{max}\) and \(h^{add}\) approximate \(h^{add}\) by assuming that singleton sub-goal facts are achieved independently.
\({\color{blue}h^{max}}\) estimates optimistically by the most costly singleton sub-goal
\({\color{blue}h^{add}}\) estimates pessimistically by summing over all singleton sub-goals
The Additive and Max Heuristics: Properties (Continued)
States for which no relaxed plan exists are easy to recognise, and that is done by both \(h^{max}\) and \(h^{add}\).
- Approximation is needed only for the cost of an optimal relaxed pan, if it exists.
Bellman-Ford: Fixed Point Iterative Algorithm for \(h^{add}\)
The same algorithm works for \(h^{max}\) as well, just change \({\color{blue}\sum}\) to \({\color{blue}max}\)
Bellman-Ford Convergence for \(h^{add}\)
Bellman-Ford for \(h^{max}\) in TSP Example?
\(P\): \(\mathit{at}(x)\) for \(x \in \{\mathit{Sy}, \mathit{Ad}, \mathit{Br}, \mathit{Pe}, \mathit{Ad}\}\); \(\mathit{v}(x)\) for \(x \in \{\mathit{Sy}, \mathit{Ad}, \mathit{Br}, \mathit{Pe}, \mathit{Ad}\}\).
\(A\): \(\mathit{drive}(x,y)\) where \(x,y\) have a road. \[ c(\mathit{drive}(x,y)) = \left \{ \begin{array}[]{ll} 1 & \{x,y\} = \{\mathit{Sy}, \mathit{Br}\}\\ 1.5 & \{x,y\} = \{\mathit{Sy}, \mathit{Ad}\}\\ 3.5 & \{x,y\} = \{\mathit{Ad}, \mathit{Pe}\}\\ 4 & \{x,y\} = \{\mathit{Ad}, \mathit{Da}\} \end{array} \right. \]
\(I\): \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\); \(G\): \(\mathit{at}(\mathit{Sy}), \mathit{v}(x) \text{ for all } x\).
Content of Tables \(T^{add}_i\)?: where \(T^{add}_i\) denotes table entry after \(i\)-th Bellman-Ford iteration?

\({\color{red}h^{max}(I)=}\) \(5.5 << 20 = h^*(I)\).
Bellman-Ford for \(h^{add}\) in TSP Example?
\(P\): \(\mathit{at}(X)\) for \(X \in \{\mathit{Sy}, \mathit{Ad}, \mathit{Br}, \mathit{Pe}, \mathit{Ad}\}\); \(\mathit{v}(X)\) for \(X \in \{\mathit{Sy}, \mathit{Ad}, \mathit{Br}, \mathit{Pe}, \mathit{Ad}\}\).
\(A\): \(\mathit{drive}(X,Y)\) where \(X,Y\) have a road. \[ c(\mathit{drive}(X,Y)) = \left \{ \begin{array}[]{ll} 1 & \{X,Y\} = \{\mathit{Sy}, \mathit{Br}\}\\ 1.5 & \{X,Y\} = \{\mathit{Sy}, \mathit{Ad}\}\\ 3.5 & \{X,Y\} = \{\mathit{Ad}, \mathit{Pe}\}\\ 4 & \{X,Y\} = \{\mathit{Ad}, \mathit{Da}\} \end{array} \right. \]
\(I\): \(\mathit{at}(\mathit{Sy}), \mathit{v}(\mathit{Sy})\); \(G\): \(\mathit{at}(\mathit{Sy}), \mathit{v}(X) \text{ for all } X\).
Content of Tables \(T^{add}_i\)?: where \(T^{add}_i\) denotes table entry after \(i\)-th Bellman-Ford iteration?
\({\color{red}h^{add}(I)=}\) \(1.5 + 1 + 5 + 5.5 = 13 > 10 = h^+(I)\). But \(< 20 = h^*(I)\).
\(h^{add}(I) > h^+(I)\) because it counts the cost of \(\mathit{drive}(\mathit{Sy},\mathit{Ad})\) 3 times:
As part of \(h^{add}(I,\{\mathit{v}(\mathit{Ad})\})\), \(h^{add}(I,\{\mathit{v}(\mathit{Pe})\})\), and \(h^{add}(I,\{\mathit{v}(\mathit{Da})\})\)!
Difference between \(h^{add}\) & \(h^{max}\) in Logistics?
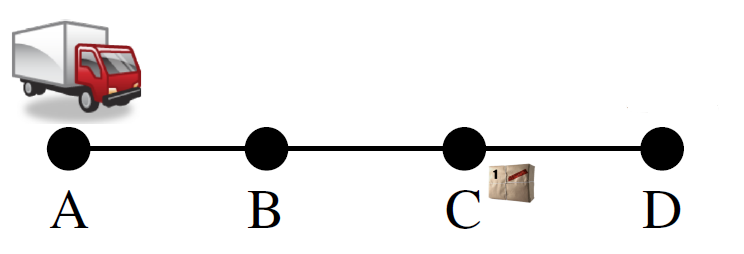
- Initial state \(I\): \(t(A), p(C)\)
- Goal \(G\): \(t(A), p(D)\)
- Actions \(A\): dr(X,Y), lo(X), ul(X).
Content of Tables ?: \(T^{add}_i\) entries are denoted in black and \({\color{red}T^{max}_i}\) in red.

\({\color{red} h^{add}(I)=}\) \(7 > h^+(I) = 5\), but \(< 8 = h^*(I)\).
\(h^{add}(I) > h^+(I)\) because? It counts the cost of \(\mathit{dr}(A,B), \mathit{dr}(B,C)\) 2 times, for the two preconditions \(\mathit{p}(T)\) and \(\mathit{t}(D)\) of achieving \(\mathit{p}(D)\).
So, what if \(G = \{\mathit{t}(D), \mathit{p}(D)\}\)? \(h^{add}(I)=\) \(10 > 5 = h^*(I) = h^+(I)\) because now \(\mathit{dr}(A,B), \mathit{dr}(B,C), \mathit{dr}(C,D)\) is counted also as part of the goal \(\mathit{t}(D)\).
The Additive and Max Heuristics in Practice?
Summary of typical issues in practice with \(h^{add}\) and \(h^{max}\):
Both \(h^{add}\) and \(h^{max}\) can be used to approximate \(h^+\) and can be computed reasonably quickly.
\(h^{max}\) is admissible, but is typically far too optimistic.
\(h^{add}\) is not admissible as it is pessimistic, but is typically a lot more informed than \(h^{max}\).
\(h^{add}\) is sometimes better informed than \(h^+\), but can be for the wrong reasons: rather than accounting for deletes, it overcounts by ignoring positive interactions, i.e. sub-plans shared between sub-goals.
- Such overcounting can result in large over-estimates of \(h^\ast\).
For the Logistics example above with goal \(\mathit{t}(d)\), if we have \(100\) packages at \(c\) that need to go to \(d\), what is \(h^{add}(I)\)?
\(703 \gg 203 = h^\ast(I) = h^+(I)\): For every package, a count of \(7\) which includes \(\mathit{dr}(a,b), \mathit{dr}(b,c)\) for getting the package into the truck, and \(\mathit{dr}(a,b), \mathit{dr}(b,c), \mathit{dr}(c,d)\) for getting the truck to \(d\).
- Relaxed plans (up next) are a means to reduce this kind of over-counting.
Relaxed Plans
Best Supporter Function
First compute a best-supporter function \(bs\), which for every fact \(p \in F\) returns an action that is deemed to be the cheapest achiever of \(p\) (within the relaxation).
Then extract a relaxed plan from that function, by applying it to singleton sub-goals and collecting all the actions.
The best-supporter function can be based directly on \(h^{max}\) or \(h^{add}\), simply selecting an action \(a\) achieving \(p\) that minimizes the sum of \(c(a)\) and the cost estimate for \(pre_a\).
Best-Supporter Functions
Example \(h^{add}\) in Logistics:

Relaxed Plan Extraction via Best Supporter Functions
Starting with top-level goals, iteratively close open singleton sub-goals by selecting best supporter. The number of iterations bounded by \(|P|\), however with the following requirements:
What if \(g \not \in add_{bs}(g)\)? Doesn’t make sense = requirement (A): \(\forall g, g \in add(bs(g))\), i.e. add effects must include goal
What if \(bs(g)\) is undefined? Runtime error = requirement (B): \(bs(g)\) must be defined
What if the support for \(g\) eventually requires \(g\) itself as a precondition? Then this does not actually yield a relaxed plan = requirement (C): must yield a relaxed plan
Relaxed Plan Extraction from \(h^{add}\) in Logistics?
- Initial state \(I\): \(t(A), p(C)\)
- Goal \(G\): \(t(A), p(D)\)
- Actions \(A\): dr(X,Y), lo(X), ul(X).

Extracting a relaxed plan:
\(bs^{add}_s(\mathit{p}(D)) =\) \(\mathit{ul}(D)\); opens \(\mathit{t}(D), \mathit{p}(T)\).
\(bs^{add}_s(\mathit{t}(D)) =\) \(\mathit{dr}(C,D)\); opens\(\;\mathit{t}(C)\).
\(bs^{add}_s(\mathit{t}(C)) =\) \(\mathit{dr}(B,C)\); opens\(\;\mathit{t}(B)\).
\(bs^{add}_s(\mathit{t}(B)) =\) \(\mathit{dr}(A,B)\); opens nothing.
\(bs^{add}_s(\mathit{p}(T)) =\) \(\mathit{lo}(C)\); opens nothing.
Anything more? No, open goals empty at this point.
\({\color{red}\mathit{h^{\mathit{FF}}(I)=}}\) \(5 = h^+(I) < 7 = h^{add}(I) < 8 = h^*(I)\).
What if \(G = \{\mathit{t}(D), \mathit{p}(D)\}\)? \(h^{\mathit{FF}}(I)=\) \(5 = h^+(I) = h^*(I)\) because relaxed plan extraction selects the drive actions only once. By contrast, \(h^{add}(I) = 10\) overcounts these actions, c.f. Bellman-Ford for \(h^{add}\) in Logistics
Best-Supporter Functions
For relaxed plan extraction to make sense, it requires a best-supporter function
Intuition for (C): Relaxed plan extraction starts at the goals, and chains backwards in the support graph. If there are cycles, then this backchaining may not reach the currently true state \(s\), and thus not yield a relaxed plan.
Support Graphs and Prerequisite (C) in Logistics
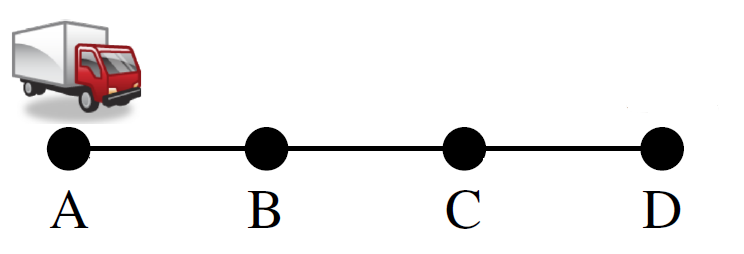
- Initial state: \(\mathit{t}A\).
- Goal: \(\mathit{t}D\).
- Actions: \(\mathit{dr}XY\).


The definition implies a closed, well-founded \(bs\)!
Proof. Since \(h^+(s) < \infty\) implies \(h^{max}(s) < \infty\), it is easy to see that \(bs^{max}_s\) is closed (details omitted).
If \(a = bs^{max}_s(p)\), then \(a\) is the action yielding \(0 < h^{max}(s,\{p\}) < \infty\) in the \(h^{max}\) equation.
Intuition: Since \(c(a) > 0\), we have \(h^{max}(s,pre_a) < h^{max}(s,\{p\})\) and thus, for all \(q \in pre_a\), \(h^{max}(s,\{q\}) < h^{max}(s,\{p\})\).
Transitively, if the support graph contains a path from fact vertex \(r\) to fact vertex \(t\), then \(h^{max}(s,\{r\}) < h^{max}(s,\{t\})\).
Thus there can’t be cycles in the support graph and \(bs^{max}_s\) is well-founded. Similar for \(bs^{add}_s\).
The Relaxed Plan Extraction: Correctness
Proof. Order \(a\) before \(a'\) whenever the support graph contains a path from \(a\) to \(a'\). Since the support graph is acyclic, such a sequencing \(\vec{a} := \langle a_1, \dots, a_n \rangle\) exists.
We have \(p \in s\) for all \(p \in pre_{a_1}\), because otherwise \(\mathit{RPlan}\) would contain the action \(bs(p)\), necessarily ordered before \(a_1\).
We have \(p \in s \cup add_{a_1}\) for all \(p \in pre_{a_2}\), because otherwise \(\mathit{RPlan}\) would contain the action \(bs(p)\), necessarily ordered before \(a_2\). Iterating the argument shows that \(\vec{a}^+\) is a relaxed plan for \(s\).
The Relaxed Plan Heuristic: \(h^{FF}\)
Recall if a relaxed plan exists, then there also exists a closed well-founded best-supporter function, see above.
By comparison:
\(h^{max}\) estimates by taking the hardest sub-goal
\(h^{add}\) estimates by summing sub-goal costs
\(h^{FF}\) estimates by extracting an actual relaxed plan in the delete-relaxed problem and then taking its cost.
The Relaxed Plan Heuristic (Continued)
Proof. \(h^{\mathit{FF}} \geq h^+\) follows directly from the previous proposition. Agrees with \(h^+\) on \(\infty\): direct from definition. Inadmissiblity: Whenever \(bs\) makes sub-optimal choices. Exercise, perhaps
Relaxed plan heuristics have the same theoretical properties as \(h^{add}\).
So what’s the point?
Can \(h^{\mathit{FF}}\) over-count, i.e., count sub-plans shared between sub-goals more than once?
No, due to the set union in “\(\mathit{RPlan} := \mathit{RPlan} \cup \{\mathit{bs}(g)\}\)”.
\(h^{\mathit{FF}}\) be inadmissible, just like \(h^{add}\), but for more subtle reasons.
In practice, \(h^{\mathit{FF}}\) typically does not over-estimate \(h^*\) (or not by a large amount, anyway); example on previous “Logistics” slide.
Helpful Actions
Remarks
Initially introduced in FF [Hoffmann and Nebel (2011)], restricting Enforced Hill-Climbing to use only the helpful actions
Expanding only helpful actions does not guarantee completeness.
Other planners use helpful actions as preferred operators, first expanding nodes resulting from helpful actions.
Conclusion
Questions
(A): No, we don’t get any new moves in the relaxation.
(B): Yes, when putting a card into a free cell, it’s still free for another card.
Questions (continued)
(A), (C), (D): Yes (similar to FreeCell)
(B): No, we don’t get any new moves
Summary
The delete relaxation simplifies STRIPS by removing all delete effects of the actions.
The cost of optimal relaxed plans yields the heuristic function \(h^+\), which is admissible but hard to compute.
We can approximate \(h^+\) optimistically by \(h^{max}\), and pessimistically by \(h^{add}\). \(h^{max}\) is admissible, \(h^{add}\) is not. \(h^{add}\) is typically much more informative, but can suffer from over-counting.
Either of \(h^{max}\) or \(h^{add}\) can be used to generate a closed well-founded best-supporter function, from which we can extract a relaxed plan. The resulting relaxed plan heuristic \(h^{\mathit{FF}}\) does not do over-counting, but otherwise has the same theoretical properties as \(h^{add}\); it typically does not over-estimate \(h^*\).
Example Classical Planning Systems
Remarks
The relaxation principle is a generic, widely applicable approach for many different contexts, as are other relaxation principles identified in the subject.
While the \(h^{max}\) heuristic is not very informative in practice, other lower-bounding approximations of \(h^+\) are very important for optimal planning, such as
Admissible landmarks heuristics [Karpas and Domshlak, IJCAI-09], and
LM-cut heuristic [Helmert and Domshlak, ICAPS-09].
It has always been a challenge to take some delete effects into account. Some work has been conducted to interpolate smoothly between \(h^+\) and \(h^*\), such as
- Explicitly represented fact conjunctions [Keyder, Hoffmann, and Haslum ICAPS-12].
Advanced Reading
Planning as Heuristic Search [Bonet and Geffner, AI-01].
A paper charting the origins of heuristics search.
Available via Institutional Login: https://www.sciencedirect.com/science/article/pii/S0004370201001084
The FF Planning System: Fast Plan Generation Through Heuristic Search [Hoffmann:nebel:jair-01].
The main reference for delete relaxation heuristics.
Available for download at https://fai.cs.uni-saarland.de/hoffmann/papers/jair01.pdf
Advanced Reading (Continued)
Semi-Relaxed Plan Heuristics [Keyder, Hoffmann, and Haslum ICAPS-12].
Available at: http://fai.cs.uni-saarland.de/hoffmann/papers/icaps12a.pdf
Computes relaxed plan heuristics within a compiled planning task \(\Pi^C_{\mathit{ce}}\), in which a subset \(C\) of all fact conjunctions in the task is represented explicitly as suggested by [Haslum, ICAPS-12].
\(C\) can in principle always be chosen so that \(h^+_{\Pi^{C}_{\mathit{ce}}}\) is perfect (equals \(h^*\) in the original planning task), so the technique allows to interpolate between \(h^+\) and \(h^*\).
In practice, small sets \(C\) sometimes suffice to obtain dramatically more informed relaxed plan heuristics.