07 Model-Free Prediction (Bandit Strategies + MC learning)
Slides
This module is also available in the following versions
Last Week: model-based solutions to MDPs
Value Iteration uses dynamic programming to recursively calculate a value function from an MDP.
\[ V(s) = \overbrace{\max_{a \in A(s)}}^{\text{best action from $s$}} \overbrace{\underbrace{\sum_{s' \in S}}_{\text{for every state}} P_a(s' \mid s) [\underbrace{R(s,a,s')}_{\text{immediate reward}} + \underbrace{\gamma}_{\text{discount factor}} \cdot \underbrace{V(s')}_{\text{value of } s'}]}^{\text{expected reward $Q(s, a)$ of executing action $a$ in state $s$}} \]
MCTS: simulate from forward from state \(s\) and backpropagate to estimate \(Q(a,s)\) for each action.
But what if you don’t have access a model/simulator?
Model-free learning
We need:
A rule for deciding which action to perform at each step based on existing knowledge —> bandit strategy
Process for aggregating & assimulating info as we go to make more informed choices in the future —> Model-free RL method, e.g. MC learning
Multi-armed Bandits
Framework for selection strategy balancing exploration and exploitation
Multi-armed bandits
Intuition: For every state \(s\), each action \(a\) = slot machine with initually unknown payoff distributions \(X_{a}\).
The “value” \(Q(s, a)\) of \(a\) corresponds to (current estimate of) \(X_{a}\).
\[ Q_t(a, s) = \frac{R(a, t)}{N(a,s, t)} \]
where \(N(a, s, t) =\) the number of times action \(a\) has been performed in state \(s\) at time \(t\), and \(R(a, t)\) is the total reward earned from those actions as of time \(t\).
Bandit algorithm
Input: Multi-armed bandit problem \(M = \langle a_i \sim X_i \rangle\)
Output: \(Q\)-values \(Q(a_i)\)
\(Q(a_i) \leftarrow 0\) for all arms \(a_i\)
\(N(a_i) \leftarrow 0\) for all arms \(a_i\)
\(t \leftarrow 1\)
while \(t < T\) do
\(a \leftarrow\) select(\(t\))
execute arm \(a\) for round \(t\) and observe reward \(r(a, t)\)
\(N(a) \leftarrow N(a) + 1\)
\(Q(a) \leftarrow \left(1 - \frac{1}{N(a)}\right)Q(a) + \frac{1}{N(a)}r(a, t)\)
\(t \leftarrow t+1\)
Bandit Selection Rules
- \(\epsilon\)-first
- \(\epsilon\)-greedy
- \(\epsilon\)-decreasing
- Upper confidence bound (UCB)
- softmax
\(\epsilon\)-first
Perform random actions (explore) for \(\epsilon*T\) rounds, where \(T =\) total number of rounds. Then always choose \(\text{argmax}_a Q(a)\) (exploit).
For each strategy, consider:
What do the parameters mean for us as modelers?
What does it mean for these numbers to be bigger/smaller?
What are the benefits and pitfalls of each strategy?
In what situations might we choose a particular strategy with particular parameter values?
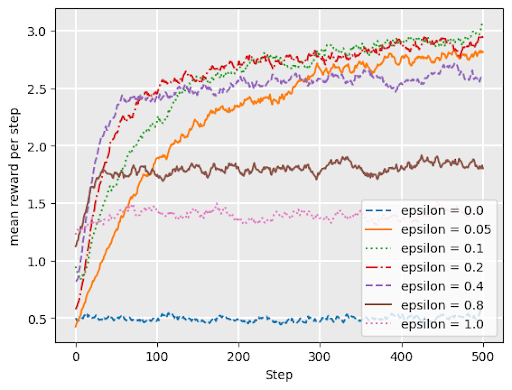
\(\epsilon\)-greedy
with probability \(1 - \epsilon\), choose the arm with maximum \(Q\)-value (exploit)
with probability \(\epsilon\), choose arm uniformly at random (explore)
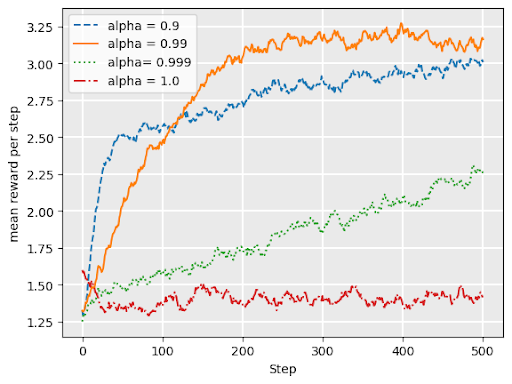
\(\epsilon\)-decreasing
Adds a variable \(\alpha\) = “decay”
\(0 < \alpha < 1\)
Like \(\epsilon\) greedy, but explore probability is \(\epsilon*\alpha^t\) at timestep \(t\)
Q: what does it mean for our exploration/ exploitation strategy for \(\epsilon\) to be larger (closer to 1)?
UCB1 (Upper confidence bound)
\[ \text{argmax}_{a}\Bigl( \overbrace{Q_t(a)}^{\text{exploit best action}} + \underbrace{\sqrt{\frac{2 \ln t}{N_t(a)}}}_{\text{explore to reduce ``UCB" on alternatives}}\Bigr) \]
Based on Hoeffding’s inequality in probability theory, moderates “greediness” based on the likely accuracy of estimate of \(Q(a)\) given available data
UCB “exploration bonus” term grows slowly (logarithmically) with \(t\), but shrinks with larger sample size \(N_t(a)\).
softmax
\[ P(a) = \frac{e^{Q(a)/\tau}}{\sum_{b\in A} e^{Q(b)/\tau}} \]
Approximates ratio of (exponential function of) current expected return for \(a\) compared to alternatives
\(\tau\) \(\geq 0\) is the temperature parameter. Dictates influence of current value of \(Q\) on decision.
lower \(\tau\) = more exploitation: small differences in \(Q\) get amplified in exponent, approaching argmax as \(\tau \to 0^+\).
higher \(\tau\) = more exploration: approaches uniform random as \(\tau \to \infty\).
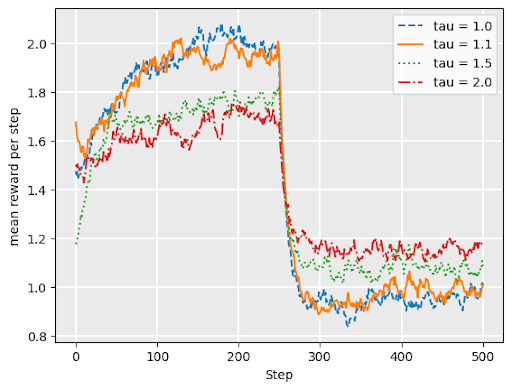
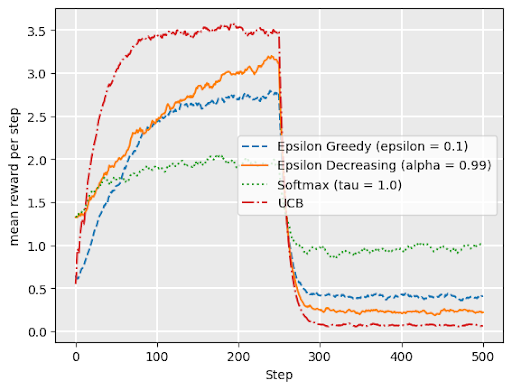
softmax continued
Softmax works well under drift– when underlying reward distributons change over time
Graph shows softmax performance for “restless bandit” where reward distributions abruptly change at \(t= 250\).
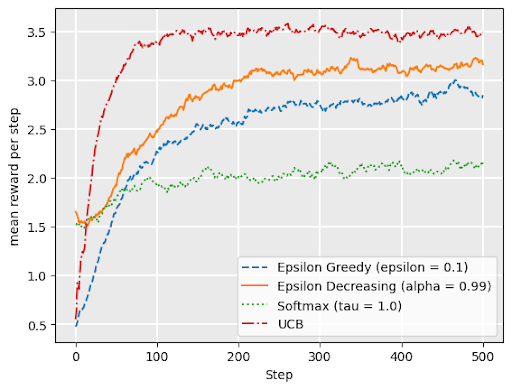
Comparing bandit strategies
no drift
drift
Upper Confidence Trees (UCT)
MCTS commonly uses a variant of UCB for its selection rule:
\[ \text{argmax}_{a \in A(s)} \Bigl( Q(s, a) + \alpha\sqrt{\frac{2 \ln(N(s))}{N(s, a)}} \Bigr) \]
where \(N(s)\) is the number of times a node has been visited, \(N(s, a)\) is the number of times action \(a\) has been chosen in that state, and \(\alpha\) is an exploration parameter.
- Note: when \(N(a) = 0\), second term is “infinity”, i.e., always choose unexplored actions first.
Monte Carlo Learning
Estimating Q(a,s) from experience
Idea:
Each state \(s\) viewed as bandit problem with arms \(A(s)\)
The “payoff” for each “arm” \(a\) is given by the total discounted reward \(G\) collected during an episode which starts by performing action \(a\) in state \(s\) \[ \begin{align} G_t &= r(s_t, a_t, s_{t+1}) + \gamma r(s_{t+1}, a_{t+1}, s_{t + 2}) + \gamma^2... \\ &= r(s_t, a_t, s_{t+1}) + \gamma G_{t+1} \end{align} \]
Maintain Q-function data structure that updates estimate \(Q(s,a)\) after each episode to reflect average return \(G\)
Q-tables
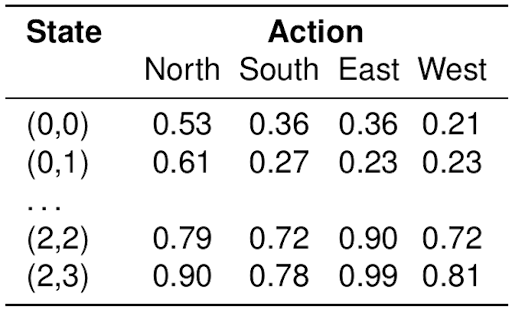
\(Q(s, a)\) indicates our current guess (observed average) for the long term expected discounted reward associated with taking action \(a\) in state \(s\)
MC learning algorithm
Initialize \(Q(s, a) \leftarrow 0\)
Generate episode using bandit strategy:
\[ s_0, a_0, r_0, s_1, a_1, r_1, s_2, a_2, ... s_T, a_T, r_T \]
- initialize discounted future reward for episode \(G \leftarrow 0\)
- Working back to front for each (first appearance of) pair \((s_t, a_t)\), update \(G\) and \(Q\) as
\[ \begin{align} G &\leftarrow r_t + \gamma G \\ Q(s_t, a_t) &\leftarrow \left( 1 - \frac{1}{N(s_t, a_t)} \right) Q(s_t, a_t) + \frac{1}{N(s_t, a_t)} G \end{align} \]
Repeat until \(Q\) converges (or time/resource budget used up)
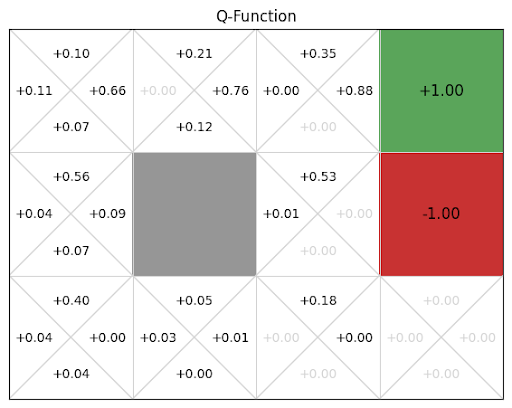
Gridworld Example
Update \(Q\)-table (initialized to 0) based on this trajectory:
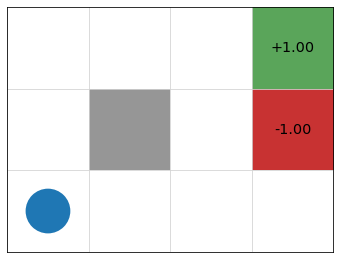
\(s_0 = (1, 1)\), \(a_0 =\) up, \(r_0 = 0\),
\(s_1 = (2, 1)\), \(a_1 =\) right, \(r_1 = 0\),
\(s_2 = (3, 1)\), \(a_2 =\) up, \(r_2 = 0\),
\(s_3 = (3, 2)\), \(a_3 =\) up, \(r_3 = 0\),
\(s_4 = (4, 2)\), \(a_4 =\) claim reward, \(r_4 = -1\).