05 Markov Decision Processes (MDPs)
Slides
This module is also available in the following versions
Intro to Reinforcement Learning (RL)
What is RL?
A machine learning paradigm in which agents learn to make sequential decisions in an uncertain environment, guided by rewards and penalties.
- Agents = perspectives: limited knowledge, outcomes influence environment
- Uncertainty comes from environment (single agent RL) or other agents (multi-agent RL)
- Learning and reward-seeking are bundled: agents learn by reinforcing rewarding behaviors
- Solutions balance exploration of options and exploitation of current best knowledge
Learning and Planning
Two fundamental problems in sequential decision making
Planning (first half of COMP90054):
A model of the environment is known
The agent performs computations with its model (without any external interaction)
The agent improves its policy through search, deliberation, reasoning, and introspection
Reinforcement Learning (this half of COMP90054):
The environment is initially unknown
The agent interacts with the environment
The agent improves its policy
Atari Example
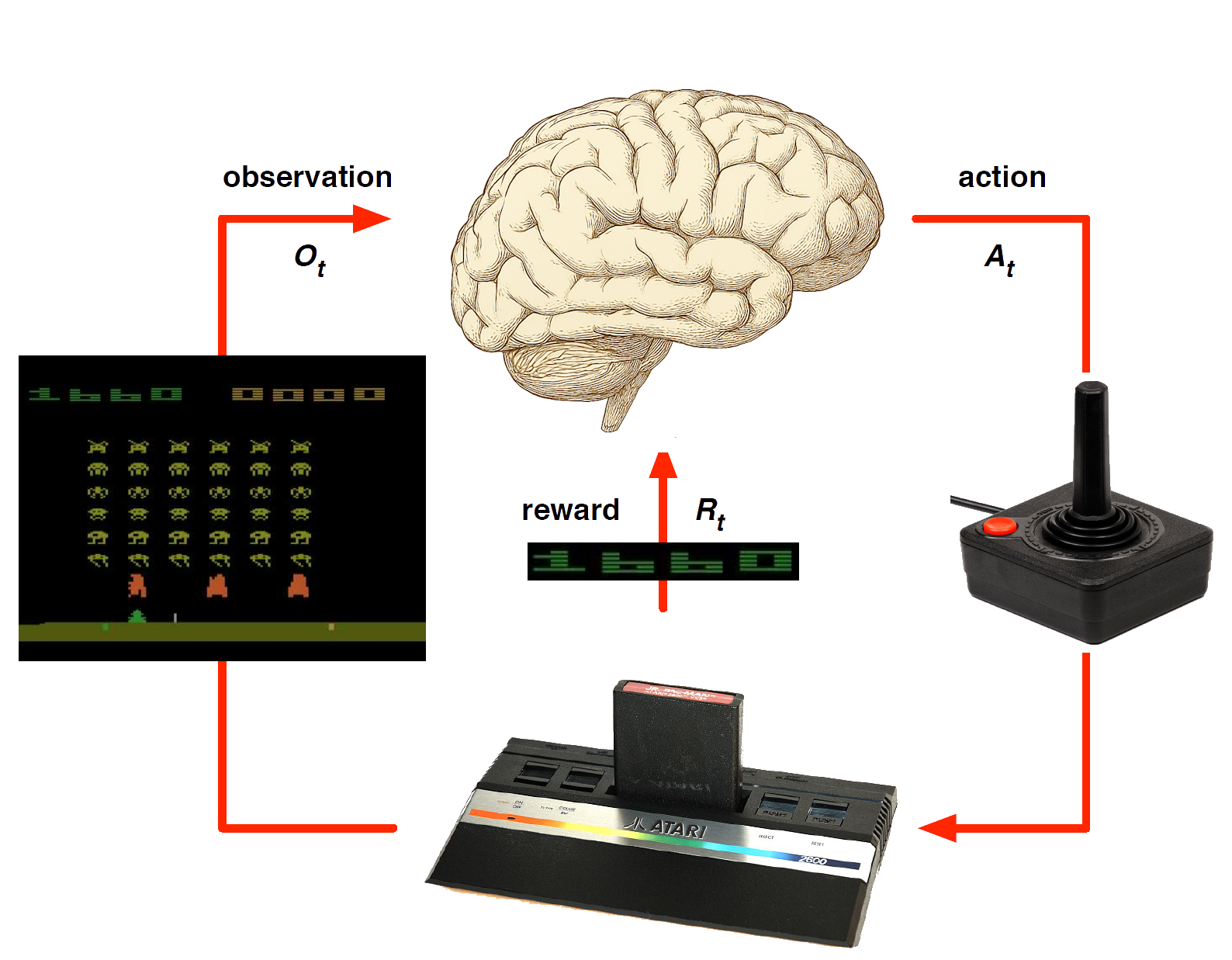
Atari Example: Planning
Rules of the game are known
Can query emulator (simulator)
- perfect model inside agent’s brain
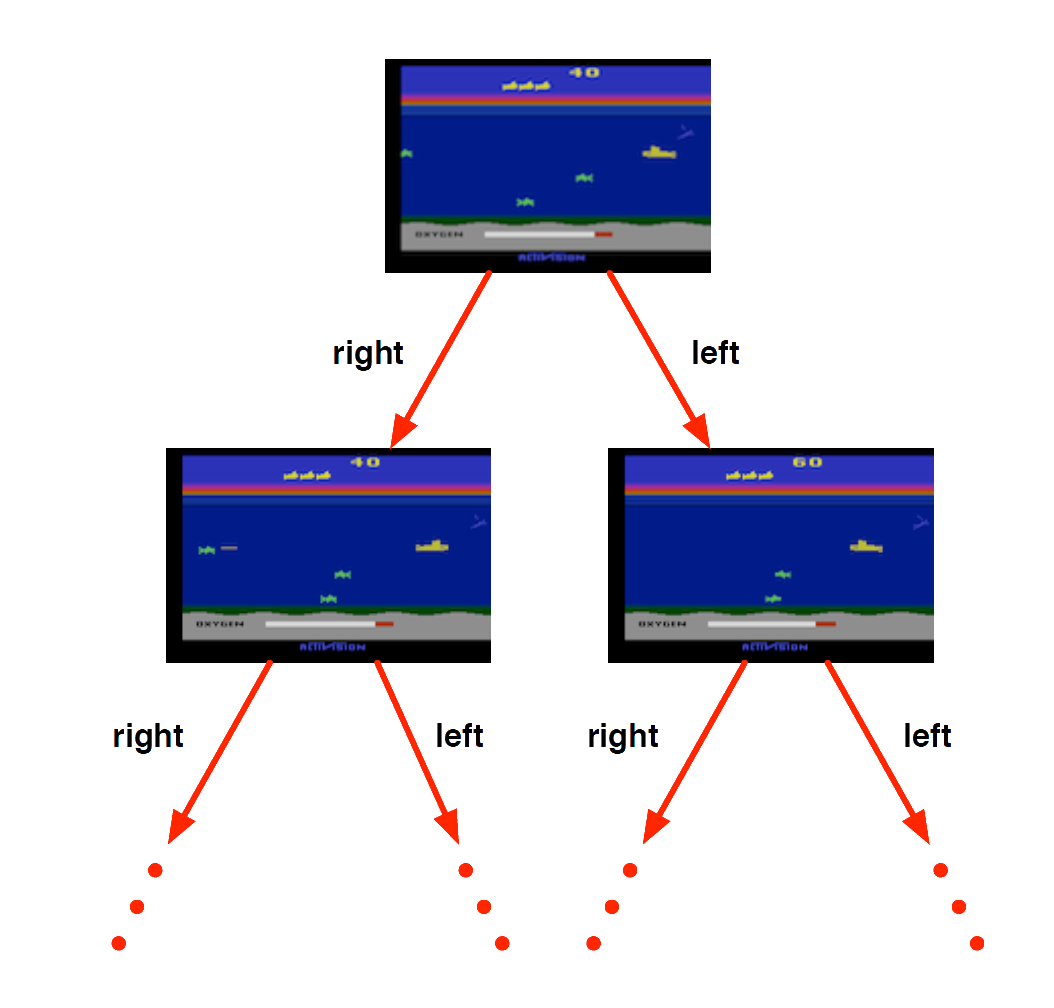
If I take action \(a\) from state \(s\):
what would the next state \(s'\) be?
what would the score be?
Plan ahead to find optimal policy, e.g. heuristic tree search, novelty etc.
Atari Example (without emulator): Reinforcement Learning
Rules of the game are unknown
Pick joystick actions, only see pixels & scores
Learn directly from interactive game-play
Examples of Reinforcement Learning
- Making a humanoid robot walk
- Fine tuning LLMs using human/AI feedback
- Optimising operating system routines
- Controlling a power station
- Managing an investment portfolio
See appendix for more details
Key Concepts in RL
Key Concepts in RL
- Decision-making under uncertainty (decision theory)
- Maximising expected rewards
- Balancing exploration and exploitation
Decision-making under uncertainty
| ☀️ Sunny | 🌧️ Raining | |
|---|---|---|
|
Bring ☂️ |
😒 | 🙂 |
|
Don’t bring ☂️ |
😀 | 😭 |
Exp(☂️) = P(☀️)·U(😒) + P(🌧️)·U(🙂)
Reward Hypothesis
Goals are characterised as the maximisation of expected cumulative reward.
Example of Rewards
- Make a humanoid robot walk
- -x reward for falling
- +y reward for forward motion
- Control inventory in a warehouse
- -x reward for stock-out penalty (lost sales)
- -y reward for holding costs (inventory)
- +z reward for sales revenue
Sequential Decision Making
Goal: select actions to maximise total future reward
Actions may have long term consequences
Reward may be delayed
It may be better to sacrifice immediate reward to gain more long-term reward
Examples:
A financial investment (may take months to mature)
A game-playing agent for a game scored at the end of many rounds of play
Exploration and Exploitation
Reinforcement learning is like trial-and-error learning
The agent should discover a good policy…
…from its experiences of the environment…
…without losing too much reward along the way.
Exploration finds more information about the environment
Exploitation exploits known information to maximise reward
Examples
Restaurant Selection
Exploitation Go to your favourite restaurant
Exploration Try a new restaurantOnline Banner Advertisements
Exploitation Show the most successful advert
Exploration Show a different advertGold exploration
Exploitation Drill core samples at the best known location
Exploration Drill at a new location
Markov Decision Processes (MDPs)
New Modelling Paradigm
CLASSICAL PLANNING
Set of states \(S\)
Initial state \(s_0\)
Actions \(A(s)\)
Transition function \(s' = f(a, s)\)
Goals \(S_G \subseteq S\)
Action costs \(c(a, s)\)
MDPs
Set of states \(S\)
Initial state \(s_0\)
Actions \(A(s)\)
Transition probabilities \(P_a(s' \mid s)\)
Reward function \(r(s, a, s')\) positive or negative of transitioning from state \(s\) to state \(s'\)
Discount factor \(0 \leq \gamma \leq 1\)
Markov Decision Process (MDP)
Definition
A Markov Decision Process is a tuple \(<\mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma>\)
\(\mathcal{S}\) is a finite set of states
\(\mathcal{{A}}\) is a finite set of actions
\(\mathcal{P}\) is a state transition probability matrix, \(P^{a}_{s,s'} = \mathbb{P} [S_{t+1} = s' | S_t = s, A_t = a]\)
\(\mathcal{R}\) is a reward function, \(\mathcal{R}^{a}_{s, s'} = \mathbb{E}[R_{t+1} | S_t = s, A_t = {a}, S_{t+1} = s' ]\)
\(\gamma\) is a discount factor \(\gamma \in [0,1]\).
Example: Gridworld
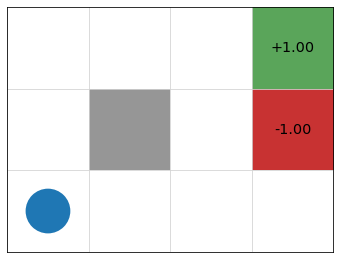
- states = cells
- actions = up, down, left, right, 10% chance of 90\(\degree\) error
- reward \(r(s) = 0\) for non-terminal nodes
- discount factor \(\gamma = 0.9\)
Episodes
An episode, history, or trajectory through an MDP is the sequence of states and actions that occur as an agent traverses an MDP.
Example:
state = (1, 1), (try to) go up,
state = (2, 1), go right,
state = (3, 1), go up,
state = (3, 2), (try to) go up
state = (4, 2) TERMINAL
Return
Why discount?
Why are Markov reward/decision processes often discounted?
Avoids infinite returns for infinite (or arbitrarily long) trajectories
Reflects uncertainty about the future when anticipating outcomes
Expresses if and how we value efficiency/speed when ranking solutions
Modelling Considerations for MDPs
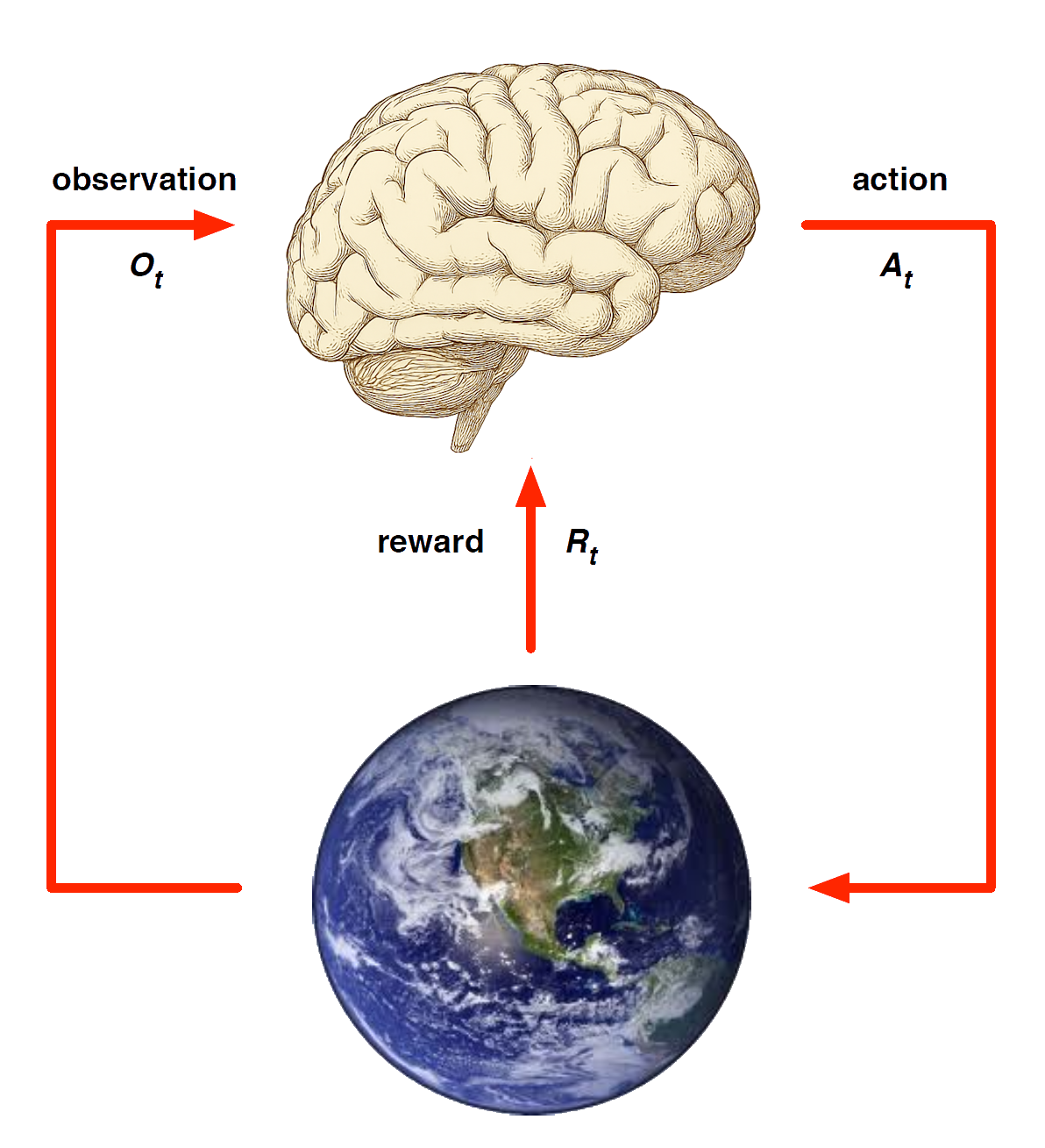
Agent and Environment
At each step \(t\) the agent:
Executes action \(A_t\)
Receives observation \(O_t\)
Receives scalar reward \(R_t\)
The environment:
Receives action \(A_t\)
Emits observation \(O_{t+1}\)
Emits scalar reward \(R_{t+1}\)
\(t\) increments at env. step
History and State
The history is sequence of observations, actions, rewards
\[ H_t = O_1,R_1,A_1, \ldots A_{t-1}, O_t, R_t \] - i.e. the stream of a robot’s actions, observations and rewards up to time \(t\)
What happens next depends on the history:
- The agent selects actions, and
- the environment selects observations/rewards.
State is the information used to determine what happens next.
Formally, a state is a function of the history: \(S_t = f(H_t )\)
Environment State
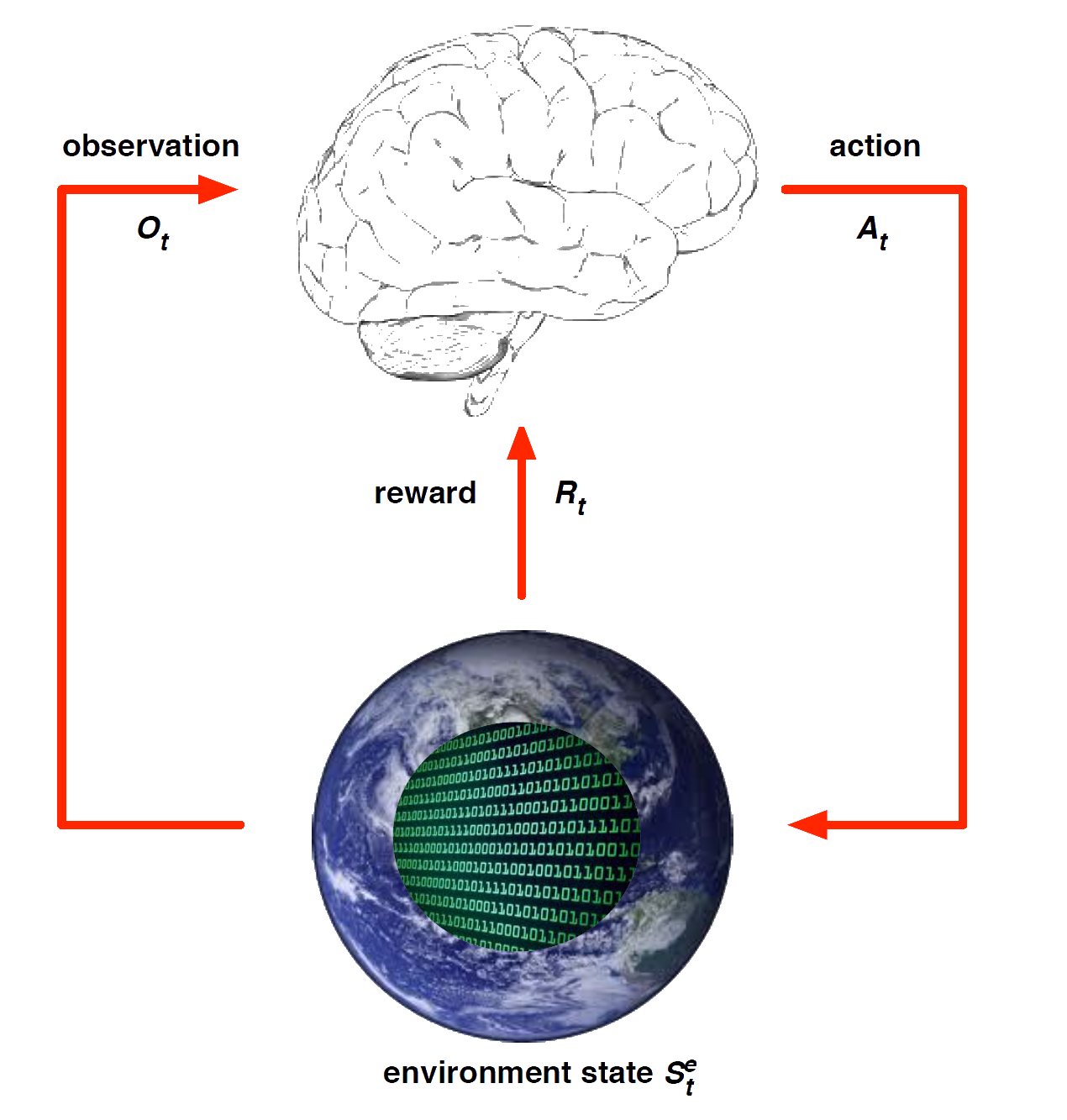
The environment state \(S^e_t\) is the environment’s private representation
- i.e. data environment uses to pick the next observation/reward
The environment state is not usually visible to the agent
- Even if \(S^e_t\) is visible, it may contain irrelevant info
Agent State
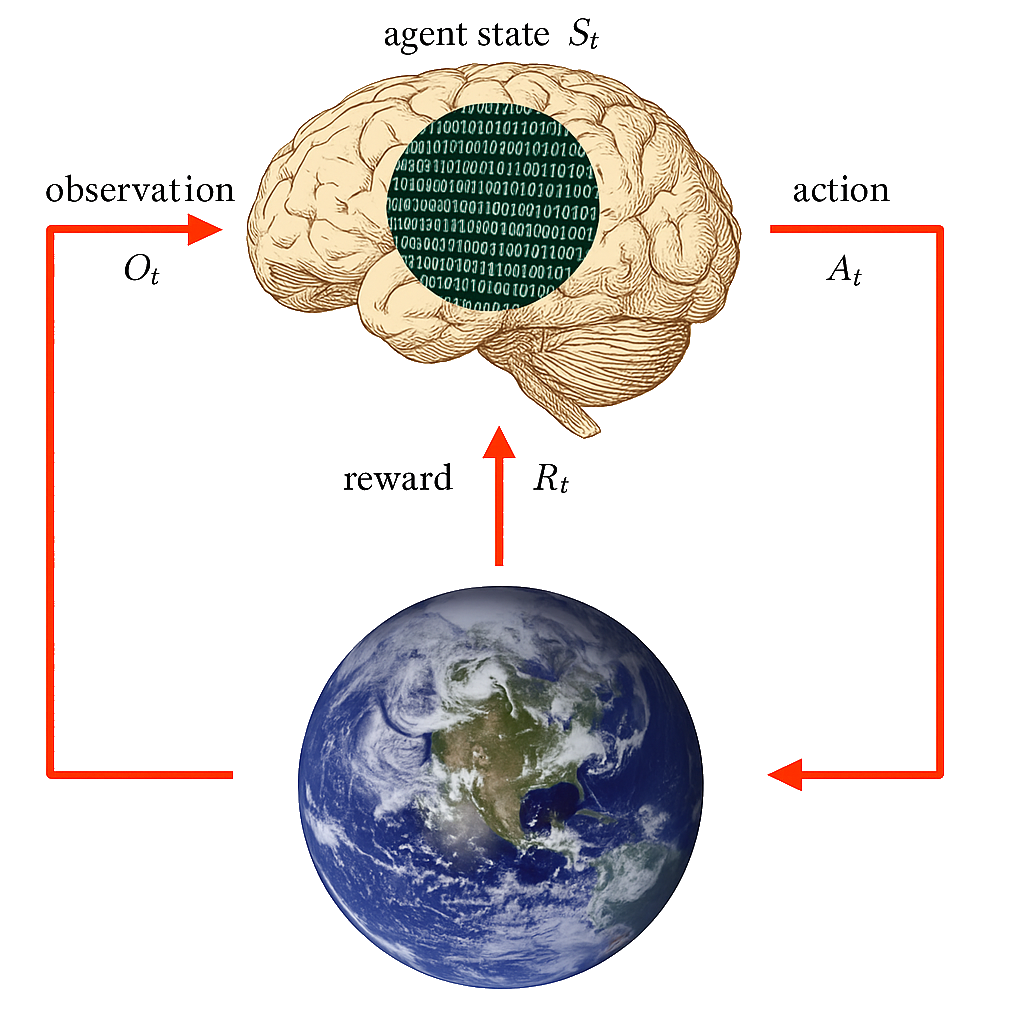
The agent state \(S^a_t\) is the agent’s internal representation
i.e. information the agent uses to pick the next action
i.e. information used by reinforcement learning algorithms
It can be any function of history: \(S^a_t = f(H_t)\)
Markov State
A Markov state (a.k.a. Information state) contains all useful information from the history.
Definition: A state \(S_t\) is Markov if and only if \[ \mathbb{P} [S_{t+1} | S_t ] = \mathbb{P} [S_{t+1}\ |\ S_1, \ldots, S_t ] \] “The future is independent of the past given the present” \[ H_{1:t} \rightarrow S_t \rightarrow H_{t+1:\infty} \]
- Why is the Markov property desirable for us?
Rat Example
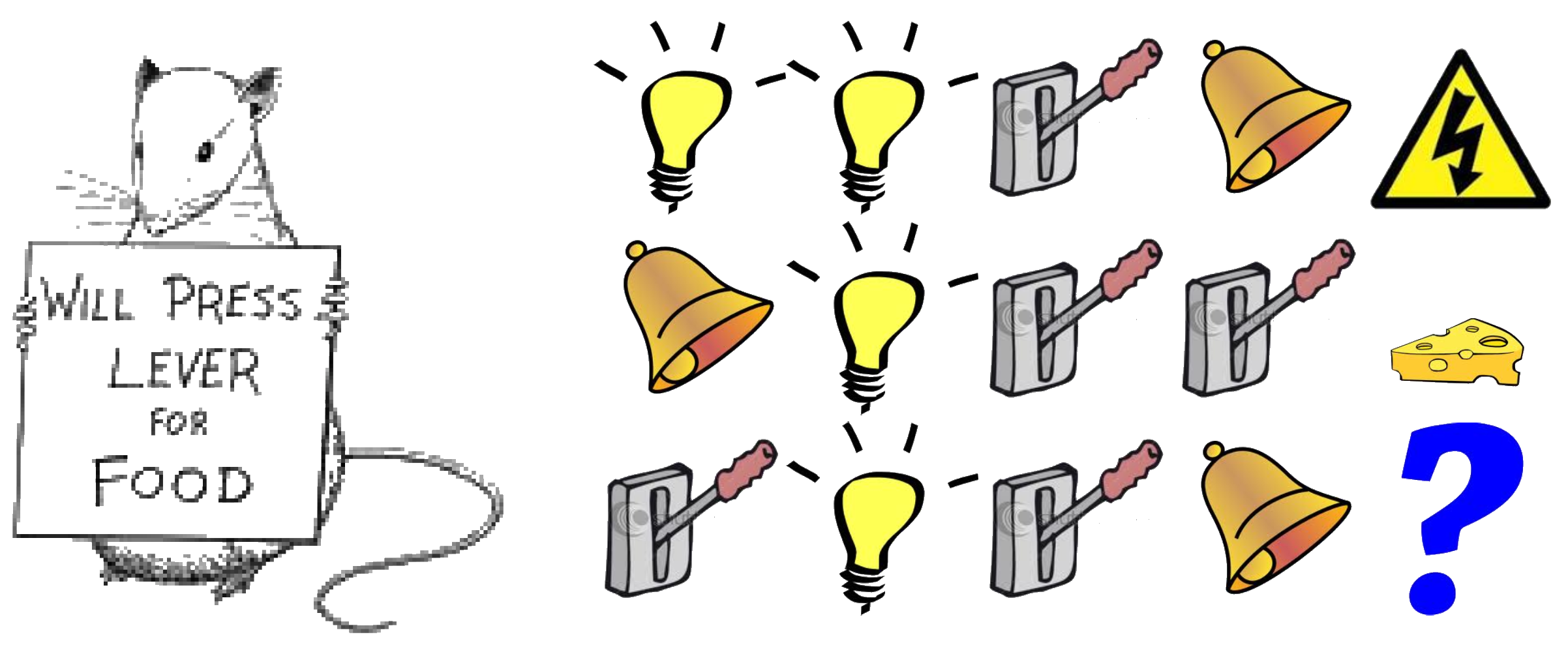
What if agent state = last \(n\) items in sequence?
What if agent state = counts for lights, bells and levers?
Solving MDPs
MDP Solutions
A “solution” to an MDP, i.e. an RL agent may include one or more of these components, depending on the method used:
Policy: agent’s behaviour function
Value function: how good is each state and/or action
Model: agent’s representation of the environment
Policy
A policy is the agent’s behaviour
It is a map from state to action, e.g.
Deterministic policy: \(a = \pi(s)\)
Stochastic policy: \(\pi(a|s) = \mathbb{P}[A_t = a|S_t = s]\)
- Why might a stochastic policy be desirable?
Example: Gridworld
- states = cells
- actions = up, down, left, right, 10% chance of 90\(\degree\) error
- reward \(r(s) = 0\) for non-terminal nodes
- discount factor \(\gamma = 0.9\)
Value Function
Value function is a prediction of future reward
Used to evaluate the goodness/badness of states, and
therefore to select between actions, e.g.
\[ V_{\pi}(s) = \mathbb{E}[R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \ldots | S_t = s] \]
The Bellman Equation
Key component of policy and and state evaluation in most RL methods
\[ V(s) = \overbrace{\max_{a \in A(s)}}^{\text{best action from $s$}} \overbrace{\underbrace{\sum_{s' \in S}}_{\text{for every state}} P_a(s' \mid s) [\underbrace{r(s,a,s')}_{\text{immediate reward}} + \underbrace{\gamma}_{\text{discount factor}} \cdot \underbrace{V(s')}_{\text{value of } s'}]}^{\text{expected reward of executing action $a$ in state $s$}} \]
Idea: the value of a states/actions can be expressed in terms of an estimate of the short term reward associated with the anticipated action to be taken in that state, plus a discounted estimate of the value of the anticipated successor state after the action is taken (calculated the same way, recursively).
Model
A model predicts what the environment will do next
\(\mathcal{P}\) predicts the probability of the next state
\(\mathcal{R}\) predicts the expectation of the next reward, e.g.
\[ \mathcal{P}^a_{ss'} = \mathbb{P}[S_{t+1} = s' | S_t = s, A_t = a] \]
\[ \mathcal{R}^a_s = \mathbb{E}[R_{t+1} | S_t = s, A_t = a] \]
Categorizing RL methods
Value Based
No Policy (Implicit)
Value Function
Policy Based
Policy
No Value Function
Actor Critic
- Policy
- Value Function
Model Free
Policy and/or Value Function
No Model
Model Based
Policy and/or Value Function
Model