Appendix (Additional Examples & Reference Material)
Appendix (Additional Examples & Reference Material)
Slides
This module is also available in the following versions
Markov Decision Processes (MDPs) - Additional Examples
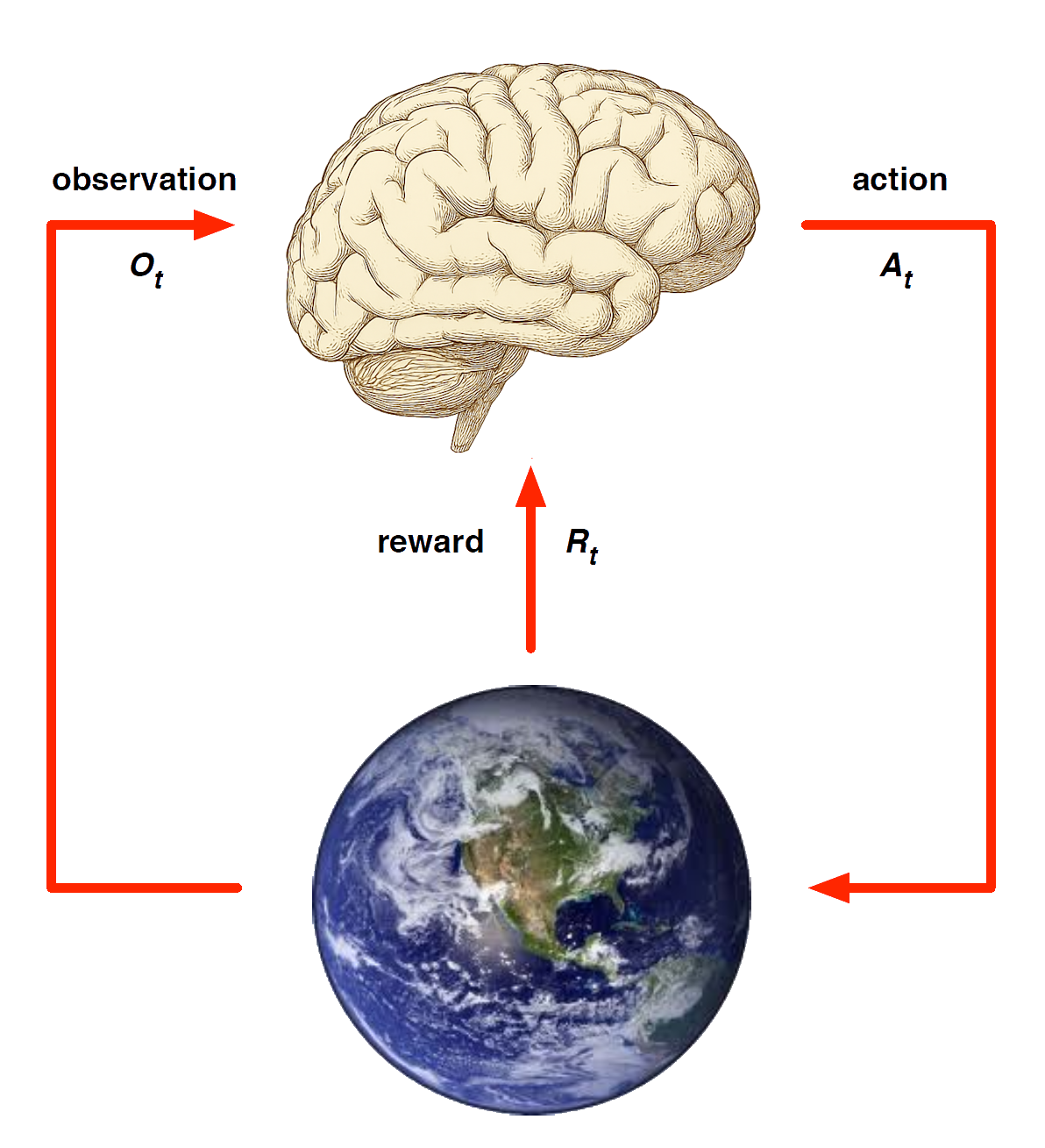
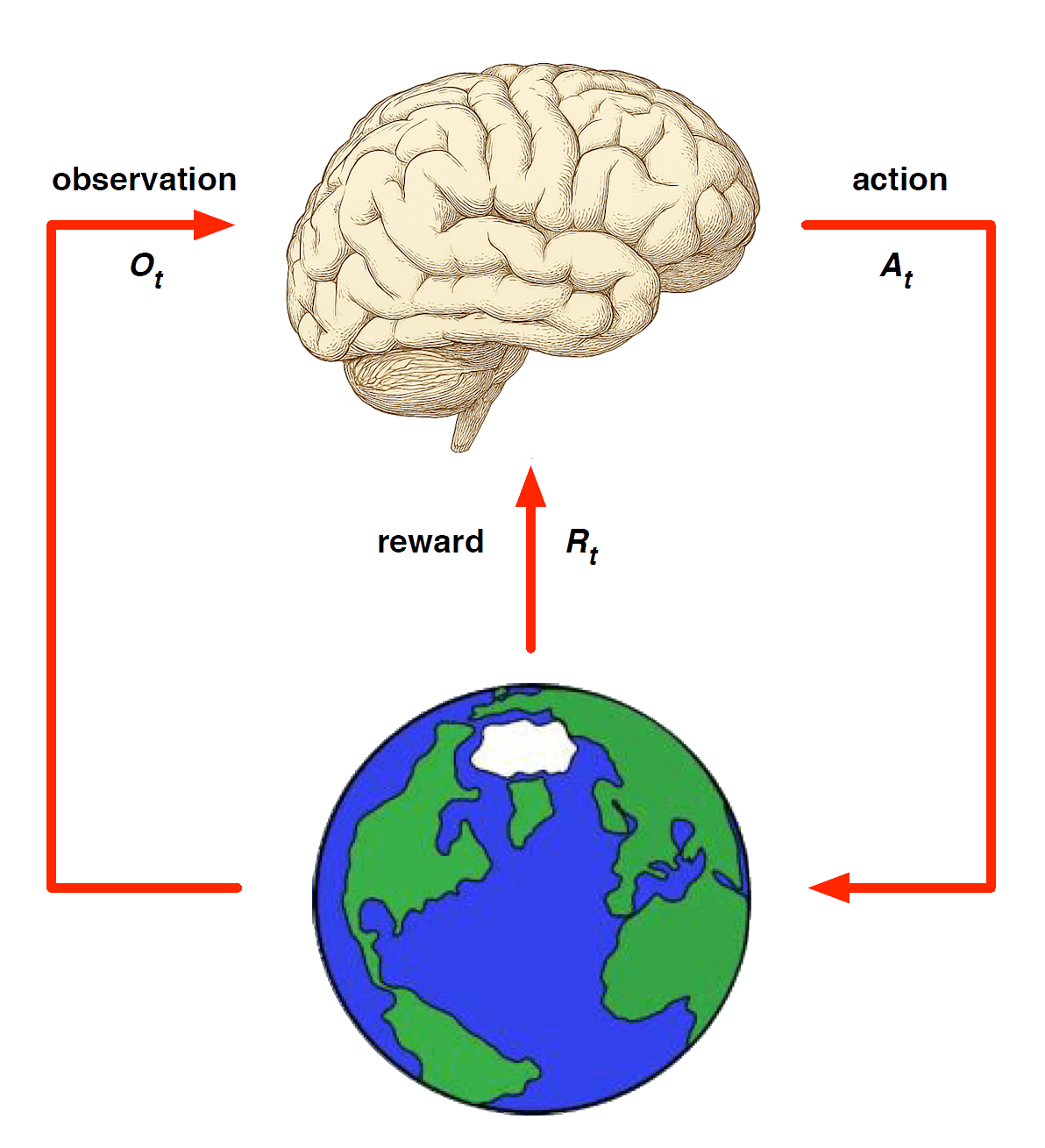
Markov decision processes formally describe an environment for reinforcement learning
Where the environment is fully observable -i.e. The current state completely characterises the process
Almost all RL problems can be formalised as MDPs, e.g.
- Optimal control primarily deals with continuous MDPs
- Partially observable problems can be converted into MDPs
- Bandits (from machine learning) are MDPs with just one state
Markov Decision Process
A Markov decision process (MDP) is a Markov reward process with decisions.
It is an environment in which all states are Markov.
We introduced agency in terms of actions.
Definition
A Markov Decision Process is a tuple \(<\mathcal{S}, \mathcal{\textcolor{red}{A}}, \mathcal{P}, \mathcal{R}, \gamma>\)
\(\mathcal{S}\) is a finite set of states
\(\mathcal{\color{red}{A}}\) is a finite set of actions
\(\mathcal{P}\) is a state transition probability matrix, \(P^{\textcolor{red}{a}}_{ss'} = \mathbb{P} [S_{t+1} = s'\ | S_t = s, A_t = \textcolor{red}{a}]\)
\(\mathcal{R}\) is a reward function, \(\mathcal{R}^{\textcolor{red}{a}}_s = \mathbb{E}[R_{t+1}\ |\ S_t = s, A_t = {\textcolor{red}{a}}]\)
\(\gamma\) is a discount factor \(\gamma \in [0,1]\).
Example: Student MDP

Agent exerts control over MDP via actions, and goal is to find the best path through decision making process to maximise rewards
Policies (1)
Definition
A (stochastic) policy \(\pi\) is a distribution over actions given states,
\[ \pi(a \mid s) = \mathbb{P}\!\left[\, A_t = a \;\middle|\; S_t = s \,\right] \]
A policy fully defines the behaviour of an agent
MDP policies depend on the current state (not the history)
i.e. Policies are stationary (time-independent), \(A_t \sim \pi(\,\cdot \mid S_t), \quad \forall t > 0\)
Policies (2) - Recovering Markov reward process from MDP
Given an MDP \(\mathcal{M} = \langle \mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma \rangle\) and a policy \(\pi\)
The state sequence \(S_1, S_2, \ldots\) is a Markov process \(\langle \mathcal{S}, \mathcal{P}^\pi \rangle\)
The state and reward sequence \(S_1, R_2, S_2, \ldots\) is a Markov reward process \(\langle \mathcal{S}, \mathcal{P}^\pi, \mathcal{R}^\pi, \gamma \rangle\), where
\[ \mathcal{P}^{\pi}_{s,s'} = \sum_{a \in \mathcal{A}} \pi(a \mid s)\, \mathcal{P}^{a}_{s s'} \]
\[ \mathcal{R}^{\pi}_{s} = \sum_{a \in \mathcal{A}} \pi(a \mid s)\, \mathcal{R}^{a}_{s} \]
Value Function
Definition
The state-value function \(v_\pi(s)\) of an MDP is the expected return starting from state \(s\), and then following policy \(\pi\)
\[ v_\pi(s) = \mathbb{E}_\pi \!\left[\, G_t \;\middle|\; S_t = s \,\right] \]
Definition
The action-value function \(q_\pi(s, a)\) is the expected return starting from state \(s\), taking action \(a\), and then following policy \(\pi\)
\[ q_\pi(s, a) = \mathbb{E}_\pi \!\left[\, G_t \;\middle|\; S_t = s,\, A_t = a \,\right] \]
Example: State-Value Function for Student MDP

Bellman Expectation Equation
The state-value function can again be decomposed into immediate reward plus discounted value of successor state,
\[ v_\pi(s) = \mathbb{E}_\pi \!\left[\, R_{t+1} + \gamma v_\pi(S_{t+1}) \;\middle|\; S_t = s \,\right] \]
Can do the same thing for the \(q\) values: the action-value function can similarly be decomposed,
\[ q_\pi(s, a) = \mathbb{E}_\pi \!\left[\, R_{t+1} + \gamma q_\pi(S_{t+1}, A_{t+1}) \;\middle|\; S_t = s,\, A_t = a \,\right] \]
Bellman Expectation Equation for \(V^{\pi}\) (look ahead)

\[ v_\pi(s) = \sum_{a \in \mathcal{A}} \pi(a \mid s)\, q_\pi(s, a) \]
Bellman Expectation Equation for \(Q^{\pi}\) (look ahead)

\[ q_\pi(s, a) = \mathcal{R}^a_s + \gamma \sum_{s' \in \mathcal{S}} \mathcal{P}^a_{s s'}\, v_\pi(s') \]
Bellman Expectation Equation for \(v_{\pi} (2)\)
Bringing it together: agent actions (open circles), environment actions (closed circles)

\[ v_\pi(s) = \sum_{a \in \mathcal{A}} \pi(a \mid s) \left( \mathcal{R}^a_s + \gamma \sum_{s' \in \mathcal{S}} \mathcal{P}^a_{s s'} \, v_\pi(s') \right) \]
Bellman Expectation Equation for \(q_{\pi} (2)\)
The other way around: can do same thing for action values

\[ q_\pi(s, a) = \mathcal{R}^a_s + \gamma \sum_{s' \in \mathcal{S}} \mathcal{P}^a_{s s'} \sum_{a' \in \mathcal{A}} \pi(a' \mid s') \, q_\pi(s', a') \]
In both forms value function is (recursively) equal to reward of immediate state \(s\) + value \(s'\) (where you end up)
Example: Bellman Expectation Equation in Student MDP

Verify Bellman Equation to compute \(v_{\pi}(s)\) for \(s=C3\)
Bellman Expectation Equation (Matrix Form)
The Bellman expectation equation can be expressed concisely using the induced MRP (as before),
\[ v_\pi = \mathcal{R}^\pi + \gamma \mathcal{P}^\pi v_\pi \]
with direct solution
\[ v_\pi = (I - \gamma \mathcal{P}^\pi)^{-1} \mathcal{R}^\pi \]
Bellman equation gives us description of system can solve
Essentially averaging then computing inverse, although inefficient!
Optimal Value Function
Optimal Value Function (Finding the best behaviour)
Definition
The optimal state-value function \(v_\ast(s)\) is the maximum value function over all policies
\[ v_\ast(s) = \max_{\pi} v_\pi(s) \]
The optimal action-value function \(q_\ast(s, a)\) is the maximum action-value function over all policies
\[ q_\ast(s, a) = \max_{\pi} q_\pi(s, a) \]
The optimal value function specifies the best possible performance in the MDP.
An MDP is “solved” when we know the optimal value function.
If you know \(q_\ast\), you have the optimal value function
So solving means finding \(q_\ast\)
Example: Optimal Value Function for Student MDP

Gives us value function for each state \(s\) (not how to behave)
Example: Optimal Action-Value Function for Student MDP

Gives us best action, \(a\), for each state \(s\) (can choose)
Optimal Policy
Define a partial ordering over policies
\[ \pi \;\geq\; \pi' \quad \text{if } v_\pi(s) \;\geq\; v_{\pi'}(s), \;\forall s \]
Theorem For any Markov Decision Process
There exists an optimal policy \(\pi_\ast\) that is better than or equal to all other policies, \(\pi_\ast \geq \pi, \;\forall \pi\)
All optimal policies achieve the optimal value function, \(v_{\pi_\ast}(s) = v_\ast(s)\)
All optimal policies achieve the optimal action-value function, \(q_{\pi_\ast}(s,a) = q_\ast(s,a)\)
Finding an Optimal Policy
An optimal policy can be found by maximising over \(q_\ast(s,a)\),
\[ \pi_\ast(a \mid s) = \begin{cases} 1 & \text{if } a = \underset{a \in \mathcal{A}}{\arg\max}\; q_\ast(s,a) \\[6pt] 0 & \text{otherwise} \end{cases} \]
- There is always a deterministic optimal policy for any MDP
- If we know \(q_\ast(s,a)\), we immediately have the optimal policy
Example: Optimal Policy for Student MDP

Red arcs (actions) represent optimal policy: picks highest \(q_\ast\)
Bellman Optimality Equation for \(v_\ast\) (look ahead)
The optimal value functions are recursively related by the Bellman optimality equations:

\[ v_\ast(s) = \max\limits_{a} q_\ast(s,a) \]
Working backwards using backup diagrams we get \(v_\ast(s)\) - best action over all policies taking max instead of average
Bellman Optimality Equation for \(Q^\ast\) (look ahead)

\[ q_\ast(s,a) = \mathcal{R}^a_s + \gamma \sum_{s' \in \mathcal{S}} \mathcal{P}^a_{ss'} \, v_\ast(s') \]
Considers where the environment might take us by averaging (looking ahead) and backing up (inductively)
Bellman Optimality Equation for \(V^* (2)\)
Bringing it together (two-step look ahead): agent actions (open circles), environment actions (closed circles)

\[ v_\ast(s) = \max\limits_{a} \mathcal{R}^a_s + \gamma \sum_{s' \in \mathcal{S}} \mathcal{P}^a_{ss'} \, v_\ast(s') \]
Bellman Optimality Equation for \(Q^* (2)\)

\[ q_\ast(s,a) = \mathcal{R}^a_s + \gamma \sum_{s' \in \mathcal{S}} \mathcal{P}^a_{ss'} \, \max\limits_{a'} q_\ast(s',a') \]
Determines \(Q^{\ast}\) reordering from environments perspective
Example: Bellman Optimality Equation in Student MDP

Compute \(v_{\ast}(s)\) for \(s=C1\) looking one step ahead (no environment actions in \(C1\))
Solving the Bellman Optimality Equation
Bellman Optimality Equation is non-linear
- No closed form solution (in general)
Many iterative solution methods
- Value Iteration (not covered in this subject)
- Policy Iteration (not covered in this subject)
- Q-learning (covered in Module 9)
- SARSA (covered in Module 9)
Model-Based Reinforcement Learning
Last Module: Learning & Relxation
This Module: learn model directly from experience
- \(\ldots\) and use planning to construct a value function or policy
Integrates learning and planning into a single architecture
Model-Based Reinforcement Learning
Model-Based and Model-Free RL
Model-Free RL
No model
Learn value function (and/or policy) from experience
Model-Based RL
Learn a model from experience
Plan value function (and/or policy) from model
Lookahead by planning (or thinking) about what the value function will be
Model-Free RL
Model-Based RL
Replace real world with the agent’s (simulated) model of the environment
- Supports rollouts (lookaheads) under imagined actions to reason about what value function will be, without further environment interaction
Model-Based RL (2)

Advantages of Model-Based RL
Advantages:
Can efficiently learn model by supervised learning methods
Can reason about model uncertainty, and even take actions to reduce uncertainty
Disadvantages:
- First learn a model, then construct a value function
\(\;\;\;\Rightarrow\) two sources of approximation error
Learning a Model
What is a Model?
A model \(\mathcal{M}\) is a representation of an MDP \(\langle \mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R} \rangle\), parameterised by \(\eta\)
- We will assume state space \(\mathcal{S}\) and action space \(\mathcal{A}\) are known
So a model \(\mathcal{M} = \langle \mathcal{P}_\eta, \mathcal{R}_\eta \rangle\) represents state transitions
\(\mathcal{P}_\eta \approx \mathcal{P}\) and rewards \(\mathcal{R}_\eta \approx \mathcal{R}\)
\[ S_{t+1} \sim \mathcal{P}_\eta(S_{t+1} \mid S_t, A_t) \]
\[ R_{t+1} = \mathcal{R}_\eta(R_{t+1} \mid S_t, A_t) \]
Typically assume conditional independence between state transitions and rewards
\[ \mathbb{P}[S_{t+1}, R_{t+1} \mid S_t, A_t] \;=\; \mathbb{P}[S_{t+1} \mid S_t, A_t] \; \mathbb{P}[R_{t+1} \mid S_t, A_t] \]
Note you can learn from each (one-step) transition, treating the following step as the supervisor for the prior step.
Model Learning
Goal: estimate model \(\mathcal{M}_\eta\) from experience \(\{S_1, A_1, R_2, \ldots, S_T\}\)
This is a supervised learning problem
\[ \begin{aligned} S_1, A_1 &\;\to\; R_2, S_2 \\ S_2, A_2 &\;\to\; R_3, S_3 \\ &\;\vdots \\ S_{T-1}, A_{T-1} &\;\to\; R_T, S_T \end{aligned} \]
Learning \(s,a \to r\) is a regression problem
Learning \(s,a \to s'\) is a density estimation problem
Pick loss function, e.g. mean-squared error, KL divergence, …
Find parameters \(\eta\) that minimise empirical loss
Examples of Models
Table Lookup Model
Linear Expectation Model
Linear Gaussian Model
Gaussian Process Model
Deep Belief Network Model
\(\cdots\) almost any supervised learning model
Table Lookup Model
Model is an explicit MDP, \(\hat{\mathcal{P}}, \hat{\mathcal{R}}\)
- Count visits \(N(s,a)\) to each state–action pair (parametric approach)
\[ \begin{align*} \hat{\mathcal{P}}^{a}_{s,s'} & = \frac{1}{N(s,a)} \sum_{t=1}^T \mathbf{1}(S_t, A_t, S_{t+1} = s, a, s')\\[0pt] \hat{\mathcal{R}}^{a}_{s} & = \frac{1}{N(s,a)} \sum_{t=1}^T \mathbf{1}(S_t, A_t = s, a)\, R_t \end{align*} \]
- Alternatively (a simple non-parametric approach)
- At each time-step \(t\), record experience tuple \(\langle S_t, A_t, R_{t+1}, S_{t+1} \rangle\)
- To sample model, randomly pick tuple matching \(\langle s,a,\cdot,\cdot \rangle\)
AB Example (Revisited) - Building a Model
Two states \(A,B\); no discounting; \(8\) episodes of experience
\(A, 0, B, 0\)
\(B, 1\)
\(B, 1\)
\(B, 1\)
\(B, 1\)
\(B, 1\)
\(B, 1\)
\(B, 0\)

We have constructed a table lookup model from the experience
Computational Complexity of Planning
Algorithmic Problems in Planning
\(\rightarrow\) The techniques successful for either one of these are almost disjoint!
\(\rightarrow\) Satisficing planning is much more effective in practice
\(\rightarrow\) Programs solving these problems are called planners, planning systems, or planning tools.
Decision Problems in Planning
Definition (PlanEx). By PlanEx, we denote the problem of deciding, given a planning task \(P\), whether or not there exists a plan for \(P\).
\(\rightarrow\) Corresponds to satisficing planning.
Definition (PlanLen). By PlanLen, we denote the problem of deciding, given a planning task \(P\) and an integer \(B\), whether or not there exists a plan for \(P\) of length at most \(B\).
\(\rightarrow\) Corresponds to optimal planning.
NP & PSPACE Classes (Refresher)
NP: Decision problems for which there exists a non-deterministic Turing machine that runs in time polynomial in the size of its input.
- Accepts if at least one of the possible runs accepts.
PSPACE: Decision problems for which there exists a deterministic Turing machine that runs in space polynomial in the size of its input.
Relationship between classes: Non-deterministic polynomial space can be simulated in deterministic polynomial space.
- Thus PSPACE = NPSPACE, and hence (trivially) NP \(\subset\) PSPACE.
For details see a computational complexity textbook, such as Garey and Johnson (1979).
Computational Complexity of PlanEx and PlanLen
Theorem. PlanEx and PlanLen are PSPACE-complete.
- “At least as hard as any other problem contained in PSPACE.”
- Details: Bylander (1994).
Domain-Specific PlanEx vs. PlanLen
- In general, both have the same complexity.
- Within particular applications, bounded length plan existence is often harder than plan existence.
- This happens in many IPC benchmark domains: PlanLen is NP-complete while PlanEx is in P.
- For example: Blocksworld and Logistics.
- In practice, optimal planning is (almost) never “easy”.
Is Blocksworld Hard?
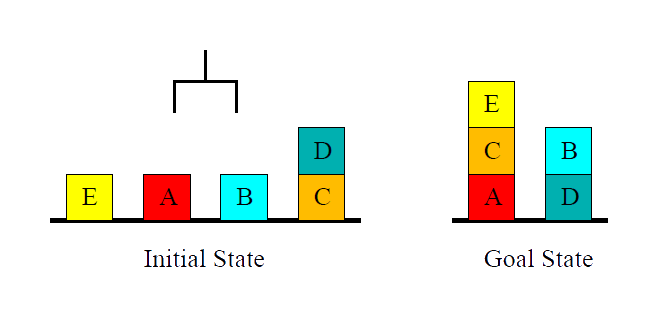
Blocksworld is Hard!
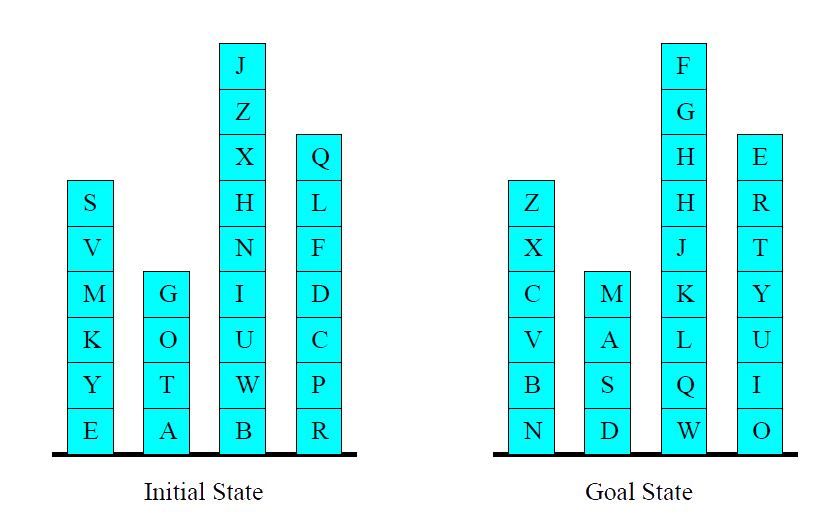
Why All the Fuss? Example Blocksworld

- \(n\) blocks, \(1\) hand.
- A single action either takes a block with the hand or puts a block we’re holding onto some other block/the table.
State Space Growth in Blocksworld
| blocks | states |
|---|---|
| 1 | 1 |
| 2 | 3 |
| 3 | 13 |
| 4 | 73 |
| 5 | 501 |
| 6 | 4051 |
| 7 | 37633 |
| 8 | 394353 … |
| blocks | states |
|---|---|
| 9 | 4596553 |
| 10 | 58941091 |
| 11 | 824073141 |
| 12 | 12470162233 |
| 13 | 202976401213 |
| 14 | 3535017524403 |
| 15 | 65573803186921 |
| 16 | 1290434218669921 |
\(\rightarrow\) State spaces may be huge. In particular, the state space is typically exponentially large in the size of its specification via the problem \(\Pi\) (up next).
\(\rightarrow\) In other words: search problems typically are computationally hard (e.g., optimal Blocksworld solving is NP-complete).
Convergence & Contraction Mapping Theorem
Convergence?
How do we know that value iteration converges to \(v_*\)?
Or that iterative policy evaluation converges to \(v_{\pi}\)?
And therefore that policy iteration converges to \(v_*\)?
Is the solution unique?
How fast do these algorithms converge?
These questions are resolved by contraction mapping theorem
Value Function Space
Consider the vector space \(\mathcal{V}\) over value functions
There are \(|\mathcal{S}|\) dimensions
Each point in this space fully specifies a value function \(v(s)\)
What does a Bellman backup do to points in this space?
We will show that it brings value functions closer,
\(\ldots\) and therefore the backups must converge on a unique solution
Value Function \(\infty\)-Norm
We will measure distance between state-value functions \(u\) and \(v\) by the \(\infty\)-norm
i.e. the largest difference between state values,
\[ \|u - v\|_{\infty} = \max_{s \in \mathcal{S}} |u(s) - v(s)| \]
Bellman Expectation Backup is a Contraction
Define the Bellman expectation backup operator \(T^{\pi}\)
\[ T^{\pi}(v) = \mathcal{R}^{\pi} + \gamma \mathcal{P}^{\pi} v \]
This operator is a \(\gamma\)-contraction, i.e. it makes value functions closer by at least \(\gamma\):
\[ \begin{align*} \|T^{\pi}(u) - T^{\pi}(v)\|_{\infty} &= \|(\mathcal{R}^{\pi} + \gamma \mathcal{P}^{\pi} u) - (\mathcal{R}^{\pi} + \gamma \mathcal{P}^{\pi} v)\|_{\infty} \\[4pt] &= \|\gamma \mathcal{P}^{\pi} (u - v)\|_{\infty} \\[4pt] &\le \|\gamma \mathcal{P}^{\pi}\|_{\infty} \, \|u - v\|_{\infty} \\[4pt] &\le \gamma \, \|u - v\|_{\infty} \end{align*} \]
Contraction Mapping Theorem
Convergence of Policy Evaluation and Policy Iteration
The Bellman expectation operator \(T^{\pi}\) has a unique fixed point
\(v_{\pi}\) is a fixed point of \(T^{\pi}\) (by the Bellman expectation equation)
By the contraction mapping theorem
Iterative policy evaluation converges on \(v_{\pi}\)
Policy iteration converges on \(v_{*}\)
Bellman Optimality Backup is a Contraction
Define the Bellman optimality backup operator \(T^{*}\),
\[ T^{*}(v) = \max_{a \in \mathcal{A}} \left( \mathcal{R}^{a} + \gamma \mathcal{P}^{a} v \right) \]
This operator is a \(\gamma\)-contraction,
i.e. it makes value functions closer by at least \(\gamma\)
(similar to previous proof)
\[ \|T^{*}(u) - T^{*}(v)\|_{\infty} \le \gamma \|u - v\|_{\infty} \]
Convergence of Value Iteration
The Bellman optimality operator \(T^*\) has a unique fixed point
\(v_*\) is a fixed point of \(T^*\) (by Bellman optimality equation)
By contraction mapping theorem
Value iteration converges on \(v_*\)
Relationship Between Forward and Backward TD
TD(\(\lambda\)) and TD(\(0\))
When \(\lambda = 0\), only the current state is updated
\[ \begin{align*} E_t(s) & = \mathbf{1}(S_t = s)\\[0pt] V(s) & \leftarrow V(s) + \alpha \delta_t E_t(s) \end{align*} \]
This is exactly equivalent to the TD(\(0\)) update
\[ V(S_t) \leftarrow V(S_t) + \alpha \delta_t \]
TD(\(\lambda\)) and MC(\(0\))
When \(\lambda = 1\), credit is deferred until the end of the episode
Consider episodic environments with offline updates
Over the course of an episode, total update for TD(\(1\)) is the same as total update for MC
MC and TD(\(1\))
Consider an episode where \(s\) is visited once at time-step \(k\)
- TD(1) eligibility trace discounts time since visit:
\[ \begin{align*} E_t(s) & = \gamma E_{t-1}(s) + \mathbf{1}(S_t = s)\\[0pt] & = \begin{cases} 0, & \text{if } t < k \\ \gamma^{t-k}, & \text{if } t \ge k \end{cases} \end{align*} \]
- TD(1) updates accumulate error online:
\[ \sum_{t=1}^{T-1} \alpha \delta_t E_t(s) = \alpha \sum_{t=k}^{T-1} \gamma^{t-k} \delta_t = \alpha (G_k - V(S_k)) \]
- By the end of the episode, it accumulates total error:
\[ \delta_k + \gamma \delta_{k+1} + \gamma^2 \delta_{k+2} + \dots + \gamma^{T-1-k} \delta_{T-1} \]
Telescoping in TD(\(1\))
When \(\lambda = 1\), the sum of TD errors telescopes into the Monte Carlo (MC) error:
\[ \begin{align*} & \delta_t + \gamma \delta_{t+1} + \gamma^{2}\delta_{t+2} + \dots + \gamma^{T-1-t}\delta_{T-1}\\[0pt] & =\; R_{t+1} + \gamma V(S_{t+1}) - V(S_t)\\[0pt] & +\; \gamma R_{t+2} + \gamma^{2} V(S_{t+2}) - \gamma V(S_{t+1})\\[0pt] & +\; \gamma^{2} R_{t+3} + \gamma^{3} V(S_{t+3}) - \gamma^{2} V(S_{t+2})\\[0pt] & \quad \quad \quad \vdots\\[0pt] & +\; \gamma^{T-1-t} R_T + \gamma^{T-t} V(S_T) - \gamma^{T-1-t} V(S_{T-1})\\[0pt] & =\; R_{t+1} + \gamma R_{t+2} + \gamma^{2} R_{t+3} + \dots + \gamma^{T-1-t} R_T - V(S_t)\\[0pt] & =\; G_t - V(S_t) \end{align*} \]
TD(\(\lambda\)) and TD(\(1\))
TD(\(1\)) is roughly equivalent to every-visit Monte-Carlo
Error is accumulated online, step-by-step
If value function is only updated online at end of episode
Then total update is exactly the same as MC
Telescoping in TD(\(\lambda\))
For general \(\lambda\), TD errors also telescope to the \(\lambda\)-error, \(G_t^{\lambda} - V(S_t)\)
\[ \begin{align*} & G_t^{\lambda}-V(S_t)\hspace{-15mm} &=-V(S_t) &+(1-\lambda)\lambda^{0}(R_{t+1} + \gamma V(S_{t+1}))\\[0pt] & & &+(1-\lambda)\lambda^{1}(R_{t+1}+\gamma R_{t+2}+\gamma^{2} V(S_{t+2})) \\[0pt] & & & + (1 - \lambda)\lambda^{2}(R_{t+1} + \gamma R_{t+2} + \gamma^{2} R_{t+3} + \gamma^{3} V(S_{t+3}))\\[0pt] & & &+ \dots \\[0pt] & &= -V(S_t) &+(\gamma\lambda)^{0}(R_{t+1}+\gamma V(S_{t+1})-\gamma\lambda V(S_{t+1})) \\[0pt] & & & + (\gamma\lambda)^{1}(R_{t+2} + \gamma V(S_{t+2}) - \gamma\lambda V(S_{t+2})) \\[0pt] & & & + (\gamma\lambda)^{2}(R_{t+3} + \gamma V(S_{t+3}) - \gamma\lambda V(S_{t+3})) \\[0pt] & & & + \dots \\[0pt] & &= \quad \quad \quad \quad & \quad (\gamma\lambda)^{0}(R_{t+1} + \gamma V(S_{t+1}) - V(S_t)) \\[0pt] & & & + (\gamma\lambda)^{1}(R_{t+2} + \gamma V(S_{t+2}) - V(S_{t+1})) \\[0pt] & & & + (\gamma\lambda)^{2}(R_{t+3} + \gamma V(S_{t+3}) - V(S_{t+2})) \\[0pt] & & & + \dots \\[0pt] & & & \hspace{-37mm} = \delta_t + \gamma\lambda \delta_{t+1} + (\gamma\lambda)^2 \delta_{t+2} + \dots \end{align*} \]
Forwards and Backwards TD(\(\lambda\))
Consider an episode where \(s\) is visited once at time-step \(k\)
TD(\(\lambda\)) eligibility trace discounts time since visit:
\[ \begin{align*} E_t(s) & = \gamma \lambda E_{t-1}(s) + \mathbf{1}(S_t = s)\\[0pt] & = \begin{cases} 0, & \text{if } t < k \\ (\gamma \lambda)^{t-k}, & \text{if } t \ge k \end{cases} \end{align*} \]
Backward TD(\(\lambda\)) updates accumulate error online:
\[ \sum_{t=1}^{T} \alpha \delta_t E_t(s) = \alpha \sum_{t=k}^{T} (\gamma \lambda)^{t-k} \delta_t = \alpha \left(G_k^{\lambda} - V(S_k)\right) \]
By the end of the episode, it accumulates total error for the \(\lambda\)-return
For multiple visits to \(s\), \(E_t(s)\) accumulates many errors
Offline Equivalence of Forward and Backward TD
Offline updates
Updates are accumulated within episode
but applied in batch at the end of episode
Online Equivalence of Forward and Backward TD
Online updates
TD(\(\lambda\)) updates are applied online at each step within episode
Forward and backward-view TD(\(\lambda\)) are slightly different
Exact online TD(\(\lambda\)) achieves perfect equivalence
By using a slightly different form of eligibility trace
Harm van Seijen, A. Rupam Mahmood, Patrick M. Pilarski, Marlos C. Machado, Richard S. Sutton; True Online Temporal-Difference Learning. Journal of Machine Learning Research (JMLR), 17(145):1−40, 2016.
Summary of Forward and Backward TD(\(\lambda\))
\[ \begin{array}{|c|c|c|c|} \hline {\color{red}{\text{Offline updates}}} & {\color{red}{\lambda = 0}} & {\color{red}{\lambda \in (0,1)}} & {\color{red}{\lambda = 1}} \\ \hline \text{Backward view} & \text{TD(0)} & \text{TD}(\lambda) & \text{TD(1)} \\[0pt] & || & || & || \\[0pt] \text{Forward view} & \text{TD(0)} & \text{Forward TD}(\lambda) & \text{MC} \\[0pt] \hline {\color{red}{\text{Online updates}}} & {\color{red}{\lambda = 0}} & {\color{red}{\lambda \in (0,1)}} & {\color{red}{\lambda = 1}} \\ \hline \text{Backward view} & \text{TD(0)} & \text{TD}(\lambda) & \text{TD(1)} \\[0pt] & || & \neq & \neq \\[0pt] \text{Forward view} & \text{TD(0)} & \text{Forward TD}(\lambda) & \text{MC} \\[0pt] & || & || & || \\[0pt] \text{Exact Online} & \text{TD(0)} & \text{Exact Online TD}(\lambda) & \text{Exact Online TD(1)} \\ \hline \end{array} \]
= here indicates equivalence in total update at end of episode.
Linear Least Squares Methods
Linear Least Squares Prediction
Experience replay finds the least squares solution
- But may take many iterations.
Using the special case of linear value function approximation
\[ \hat{v}(s,\mathbf{w}) = x(s)^\top \mathbf{w} \]
We can solve the least squares solution directly using a closed form
Linear Least Squares Prediction (2)
At the minimum of \(LS(\mathbf{w})\), the expected update must be zero:
\[\begin{align*} \mathbb{E}_{\mathcal{D}} \left[ \Delta \mathbf{w} \right] &= 0\;\;\; \text{(want update zero across data set)} \\[0pt] \alpha \sum_{t=1}^{T} \mathbf{x}(s_t) \bigl( v_t^{\pi} - \mathbf{x}(s_t)^{\top} \mathbf{w} \bigr) &= 0\;\;\; \text{(unwrapping expected updates)}\\[0pt] \sum_{t=1}^{T} \mathbf{x}(s_t) v_t^{\pi} &= \sum_{t=1}^{T} \mathbf{x}(s_t) \mathbf{x}(s_t)^{\top} \mathbf{w} \\[0pt] \mathbf{w} &= \left( \sum_{t=1}^{T} \mathbf{x}(s_t) \mathbf{x}(s_t)^{\top} \right)^{-1} \sum_{t=1}^{T} \mathbf{x}(s_t) v_t^{\pi} \end{align*}\]
Compute time: \(O(N^3)\) for \(N\) features (direct),
or incremental \(O(N^2)\) using Sherman–Morrison.
- Sometimes better or cheaper than experience replay, e.g. if have only a few features for the linear cases.
Linear Least Squares Prediction Algorithms
We do not know true values \(v_t^\pi\)
- In practice, our “training data” must use noisy or biased samples of \(v^{\pi}_t\)
\[\begin{align*} {\color{blue}{\text{LSMC}}} \;\;\;\;&\text{Least Squares Monte-Carlo uses return}\\[0pt] & v_t^\pi \approx {\color{red}{G_t}} \\[0pt] {\color{blue}{\text {LSTD}}} \;\;\;\; & \text{Least Squares Temporal-Difference uses TD target}\\[0pt] & v_t^\pi \approx {\color{red}{R_{t+1} + \gamma \hat{v}(S_{t+1}, \mathbf{w})}}\\[0pt] {\color{blue}{\text{LSTD}}}{\color{blue}{(\lambda)}}\;\;\;\; & \text{Least Squares TD}(\lambda)\text{ uses}\;\lambda\text{-return} \\[0pt] & v_t^\pi \approx {\color{red}{G_t^\lambda}} \end{align*}\]
In each case we can solve directly for the fixed point of MC / TD / TD(\(\lambda\))
Linear Least Squares Prediction Algorithms (2)
\[\begin{align*} {\color{red}{\text{LSMC}}} \;\;\;\; 0 & = \sum_{t=1}^T \alpha \big(G_t - \hat{v}(S_t,\mathbf{w})\big)\, \textbf{x}(S_t),\qquad\\[0pt] \mathbf{w} & = \left(\sum_{t=1}^T \textbf{x}(S_t) \textbf{x}(S_t)^\top \right)^{-1} \left(\sum_{t=1}^T \textbf{x}(S_t) G_t \right)\\[0pt] {\color{red}{\text{LSTD}}} \;\;\;\; 0 & = \sum_{t=1}^T \alpha \big(R_{t+1} + \gamma \hat{v}(S_{t+1},\mathbf{w}) - \hat{v}(S_t,\mathbf{w})\big)\, \textbf{x}(S_t)\\[0pt] \mathbf{w} & = \left(\sum_{t=1}^T \textbf{x}(S_t)\big(x(S_t) - \gamma \textbf{x}(S_{t+1})\big)^\top \right)^{-1} \left(\sum_{t=1}^T \textbf{x}(S_t) R_{t+1}\right)\\[0pt] {\color{red}{\text{LSTD}}}{\color{red}{(\lambda)}}\;\;\;\; 0 & = \sum_{t=1}^T \alpha\, \delta_t\, E_t,\qquad\\[0pt] \mathbf{w} & = \left(\sum_{t=1}^T E_t \big(\textbf{x}(S_t) - \gamma \textbf{x}(S_{t+1})\big)^\top \right)^{-1} \left(\sum_{t=1}^T E_t R_{t+1}\right) \end{align*}\]
Convergence of Linear Least Squares Prediction Algorithms
\[ \begin{array}{l l c c c} \hline \text{On/Off-Policy} & \text{Algorithm} & \text{Table Lookup} & \text{Linear} & \text{Non-Linear} \\ \hline \text{On-Policy} & \textit{MC} & \checkmark & \checkmark & \checkmark \\ & {\color{red}{\textit{LSMC}}} & {\color{red}{\checkmark}} & {\color{red}{\checkmark}} & {\color{red}{-}} \\ & \textit{TD} & \checkmark & \checkmark & \text{✗} \\ & {\color{red}{\textit{LSTD}}} & {\color{red}{\checkmark}} & {\color{red}{\checkmark}} & {\color{red}{-}} \\ \hline \text{Off-Policy} & \textit{MC} & \checkmark & \checkmark & \checkmark \\ & {\color{red}{\textit{LSMC}}} & {\color{red}{\checkmark}} & {\color{red}{\checkmark}} & {\color{red}{-}} \\ & \textit{TD} & \checkmark & \text{✗} & \text{✗} \\ & {\color{red}{\textit{LSTD}}} & {\color{red}{\checkmark}} & {\color{red}{\checkmark}} & {\color{red}{-}} \\ \hline \end{array} \]
Least Squares Policy Iteration

Policy evaluation Policy evaluation by least-squares Q-learning
Policy improvement Greedy policy improvement
Least Squares Action-Value Function Approximation
Approximate action-value function \(q_\pi(s, a)\)
- using linear combination of features \(\mathbf{x}(s, a)\)
\[ \hat{q}(s, a, \mathbf{w}) = \mathbf{x}(s, a)^\top \mathbf{w} \;\approx\; q_\pi(s, a) \]
Minimise least squares error between \(\hat{q}(s, a, \mathbf{w})\) and \(q_\pi(s, a)\)
from experience generated using policy \(\pi\)
consisting of \(\langle (state, action), value \rangle\) pairs
\[ \mathcal{D} = \Bigl\{ \langle (s_1, a_1), v_1^\pi \rangle,\; \langle (s_2, a_2), v_2^\pi \rangle,\; \ldots,\; \langle (s_T, a_T), v_T^\pi \rangle \Bigr\} \]
Least Squares Control
For policy evaluation, we want to efficiently use all experience
For control, we also want to improve the policy
The experience is generated from many policies
So to evaluate \(q_\pi(S,A)\) we must learn off-policy
We use the same idea as Q-learning:
- Experience from old policy: \((S_t, A_t, R_{t+1}, S_{t+1}) \sim \pi_{\text{old}}\)
- Consider alternative successor action \(A^{\prime} = \pi_{\text{new}}(S_{t+1})\)
- Update \(\hat{q}(S_t, A_t, \mathbf{w})\) toward
\[ R_{t+1} + \gamma\, \hat{q}(S_{t+1}, A^{\prime}, \mathbf{w}) \]
Least Squares Q-Learning
Consider the following linear Q-learning update
\[\begin{align*} \delta &= R_{t+1} + \gamma \hat{q}(S_{t+1}, {\color{red}{\pi(S_{t+1})}}, \mathbf{w}) - \hat{q}(S_t, A_t, \mathbf{w}) \\[0.5em] \Delta \mathbf{w} &= \alpha \, \delta \, \mathbf{x}(S_t, A_t) \end{align*}\]
LSTDQ algorithm: solve for total update \(=\) zero
\[\begin{align*} 0 &= \sum_{t=1}^T \alpha \Big( R_{t+1} + \gamma \hat{q}(S_{t+1}, {\color{red}{\pi(S_{t+1})}}, \mathbf{w}) - \hat{q}(S_t, A_t, \mathbf{w}) \Big)\mathbf{x}(S_t, A_t) \\[1em] \mathbf{w} &= \Bigg( \sum_{t=1}^T \mathbf{x}(S_t, A_t)\big(\mathbf{x}(S_t, A_t) - \gamma \mathbf{x}(S_{t+1}, \pi(S_{t+1}))\big)^\top \Bigg)^{-1} \sum_{t=1}^T \mathbf{x}(S_t, A_t) R_{t+1} \end{align*}\]
Least Squares Policy Iteration Algorithm
The following pseudo-code uses LSTDQ for policy evaluation
It repeatedly re-evaluates experience \(\mathcal{D}\) with different policies
Convergence of Control Algorithms
\[ \begin{array}{l l c c c} \hline \text{Algorithm} & \text{Table Lookup} & \text{Linear} & \text{Non-Linear} \\ \hline \textit{Monte-Carlo Control} & \checkmark & (\checkmark) & \text{✗} \\ \textit{Sarsa} & \checkmark & (\checkmark) & \text{✗} \\ \textit{Q-Learning} & \checkmark & \text{✗} & \text{✗} \\ \textit{\color{red}{LSPI}} & \checkmark & (\checkmark) & - \\ \hline \end{array} \]
(\(\checkmark\)) = chatters around near-optimal value function.
Chain Walk Example (More complicated random walk)

Consider the 50 state version of this problem (bigger replica of this diagram)
Reward \(+1\) in states \(10\) and \(41\), \(0\) elsewhere
Optimal policy: R (\(1-9\)), L (\(10-25\)), R (\(26-41\)), L (\(42, 50\))
Features: \(10\) evenly spaced Gaussians (\(\sigma = 4\)) for each action
Experience: \(10,000\) steps from random walk policy
LSPI in Chain Walk: Action-Value Function

Plots show LSPI iterations on a 50-state chain with a radial basis function approximator.
The colours represent two different actions of going left (blue) or right (red)
The plots show the true value function (dashed) or approximate value function
You can see it converges to the optimal policy after only \(7\) iterations.
LSPI in Chain Walk: Policy

Plots of policy improvement over LSPI iterations (using same 50-state chain example).
- Shows convergence of LSPI policy to optimal within a few iterations.
Natural Actor-Critic (Advanced Topic)
Alternative Policy Gradient Directions
Gradient ascent algorithms can follow any ascent direction
- A good ascent direction can significantly speed convergence
Also, a policy can often be reparametrised without changing action probabilities
For example, increasing score of all actions in a softmax policy
The vanilla gradient is sensitive to these reparametrisations
Compatible Function Approximation (CFA)
Policy Gradient with a Learned Critic
We want to estimate the true gradient \[ \nabla_\theta J(\theta) = \mathbb{E}_\pi \!\left[ \nabla_\theta \log \pi_\theta(a|s)\, Q^\pi(s,a) \right] \]
But \(Q^\pi(s,a)\) is unknown — so we approximate it with a parametric critic \({\color{red}{Q_w(s,a)}}\)
Compatibility Conditions for Critic
Linear in the policy’s score function \[ Q_w(s,a) = w^\top \nabla_\theta \log \pi_\theta(a|s) \]
Weights chosen to minimise on-policy error \[ w^* = \arg\min_w \mathbb{E}_\pi \left[ \big(Q^\pi(s,a) - Q_w(s,a)\big)^2 \right] \]
Compatibility Conditions—A Beautiful Result
If both compatibility conditions hold, then
\[ \nabla_\theta J(\theta) = \mathbb{E}_\pi \left[ \nabla_\theta \log \pi_\theta(a|s)\, Q_w(s,a) \right] \]
That is — the approximate critic yields the exact policy gradient.
Intuition
The critic lies in the same space as the policy’s gradient features
The actor and critic share a common geometry
The critic projects \(Q^\pi\) onto the policy’s tangent space
Variance reduction without bias — a perfect harmony between learning and estimation
Natural Policy Gradient—Fisher Information Matrix
The natural policy gradient is parametrisation independent
- It finds the ascent direction that is closest to the vanilla gradient, when changing policy by a small, fixed amount
\[ \nabla^{\text{nat}}_{\theta} \pi_{\theta}(s,a) = G_{\theta}^{-1} \nabla_{\theta} \pi_{\theta}(s,a) \]
- where \(G_{\theta}\) is the Fisher information matrix (Measures how sensitive a probability distribution is to changes in its parameters) \[ G_{\theta} = \mathbb{E}_{\pi_{\theta}} \Big[ {\color{blue}{\nabla_{\theta} \log \pi_{\theta}(s,a) \; \nabla_{\theta} \log \pi_{\theta}(s,a)^\top }}\Big] \]
Natural Actor-Critic—Compatible Function Approximation
Uses compatible function approximation,
\[ \nabla_{\mathbf{w}} A_{\mathbf{w}}(s,a) = \nabla_{\theta} \log \pi_{\theta}(s,a) \]
So the natural policy gradient simplifies,
\[ \begin{align*} \nabla_{\theta} J(\theta) &= \mathbb{E}_{\pi_{\theta}} \big[ \nabla_{\theta} \log \pi_{\theta}(s,a) \; A^{\pi_{\theta}}(s,a) \big] \\[2pt] &= \mathbb{E}_{\pi_{\theta}} \Big[ \nabla_{\theta} \log \pi_{theta}(s,a) \, \nabla_{\theta} \log \pi_{\theta}(s,a)^\top \Big] \mathbf{w} \\[2pt] &= G_{\theta} \, \mathbf{w}\\[2pt] {\color{red}{\nabla_{\theta}^{\text{nat}} J(\theta)}} & {\color{red}{= \mathbf{w}}} \end{align*} \]
i.e. update actor parameters in direction of critic parameters \(\mathbf{w}\)
Natural Policy Gradient—Parameterisation Invariant

- The black contours show level sets of equal performance \(J(\theta)\)
- The blue arrows show the ordinary gradient ascent direction for each point in parameter space (not orthogonal to the contours, behave irregularly across space)
- The red arrows are the natural gradient directions (ascent directions are orthogonal to contours and smoothly distributed)
- Natural gradient respects geometry of probability distributions—it finds steepest ascent direction measured in policy (distributional) space, not raw parameter space
Natural Actor Critic in Snake Domain

- The dynamics are nonlinear and continuous—a good test of policy gradient methods.
Natural Actor Critic in Snake Domain (2)

- The geometry of the corridor causes simple gradient updates to oscillate or diverge, but natural gradients (which adapt to curvature via the Fisher matrix independent of parameters) make stable, efficient progress.