Atari Example
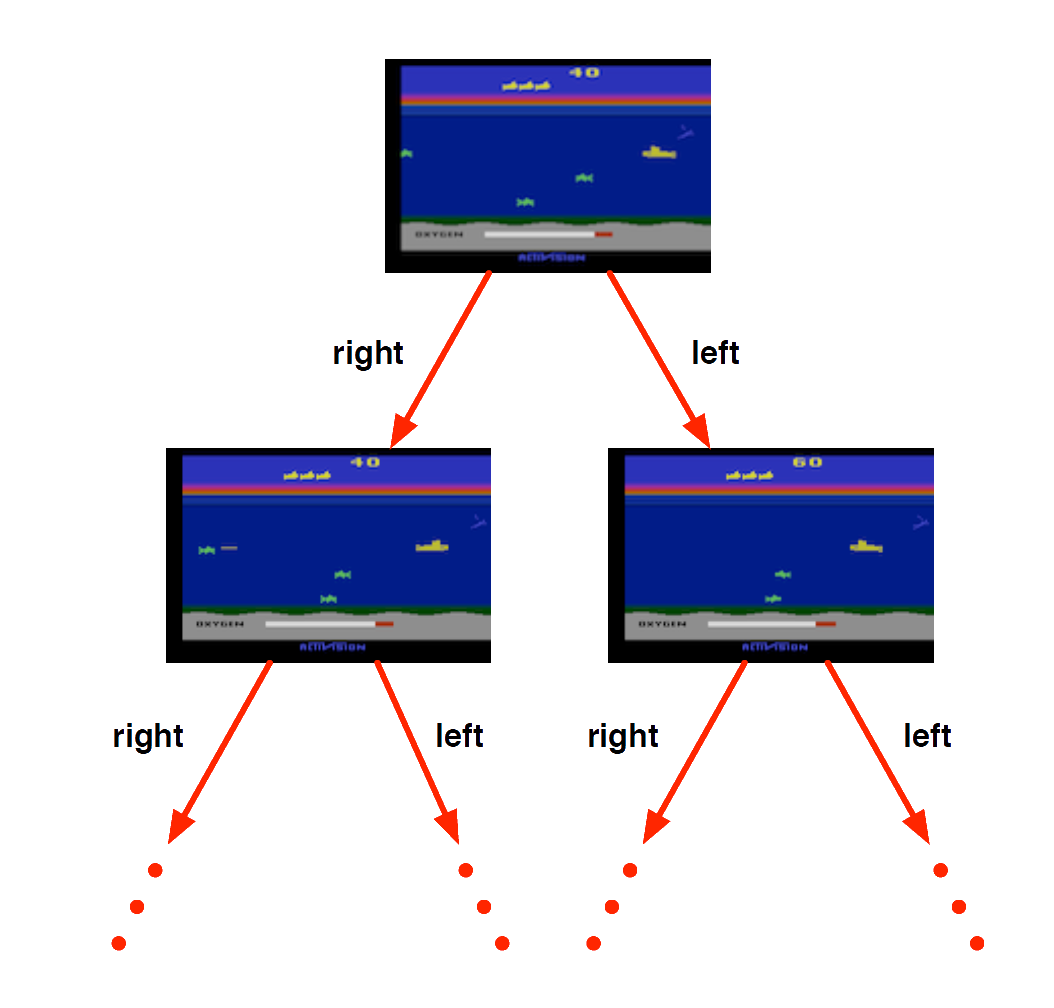
Atari Example: Planning
Rules of the game are known
Can query emulator (simulator)
- perfect model inside agent’s brain
If I take action \(a\) from state \(s\):
what would the next state \(s'\) be?
what would the score be?
Plan ahead to find optimal policy, e.g. heuristic tree search, novelty etc.
Atari Example (without emulator): Reinforcement Learning
Rules of the game are unknown
Pick joystick actions, only see pixels & scores
Learn directly from interactive game-play
Evolution of RL in the ERA of experience
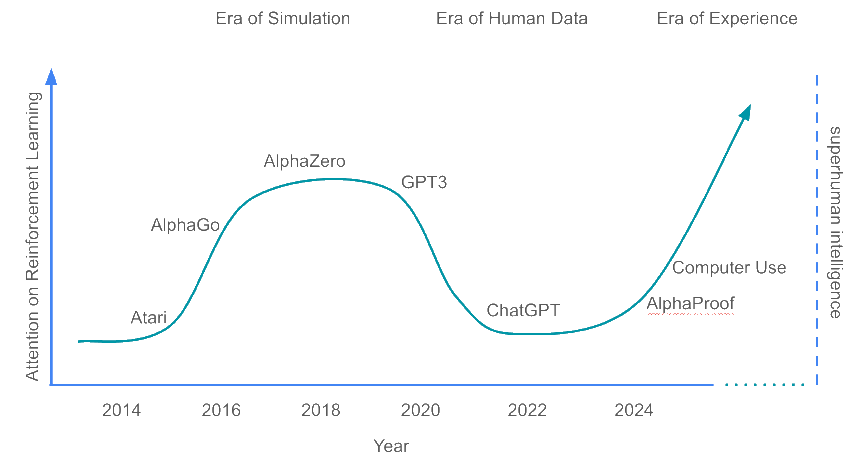
Figure: David Silver & Rich Sutton, The ERA of Experience, 2025
Agent
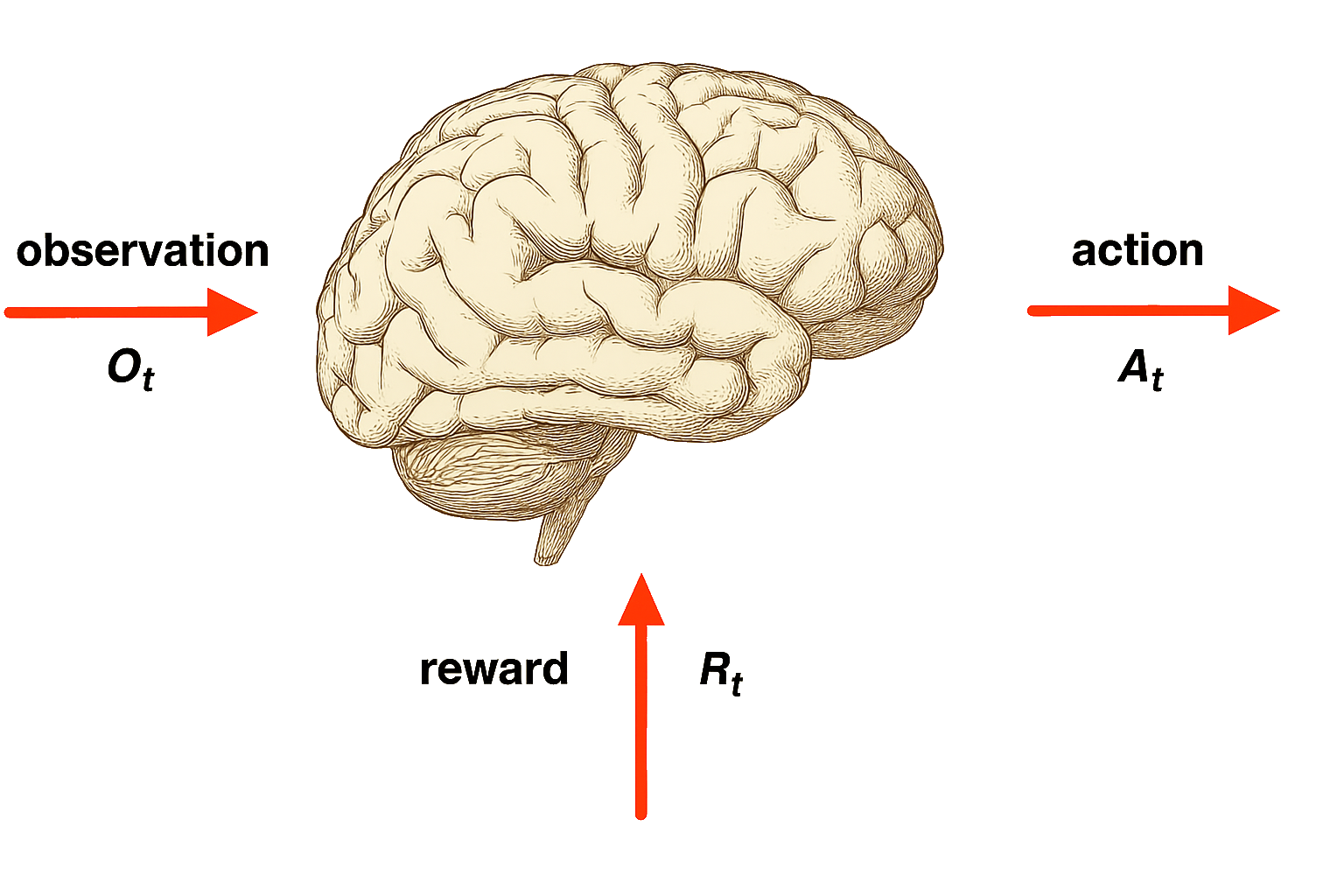
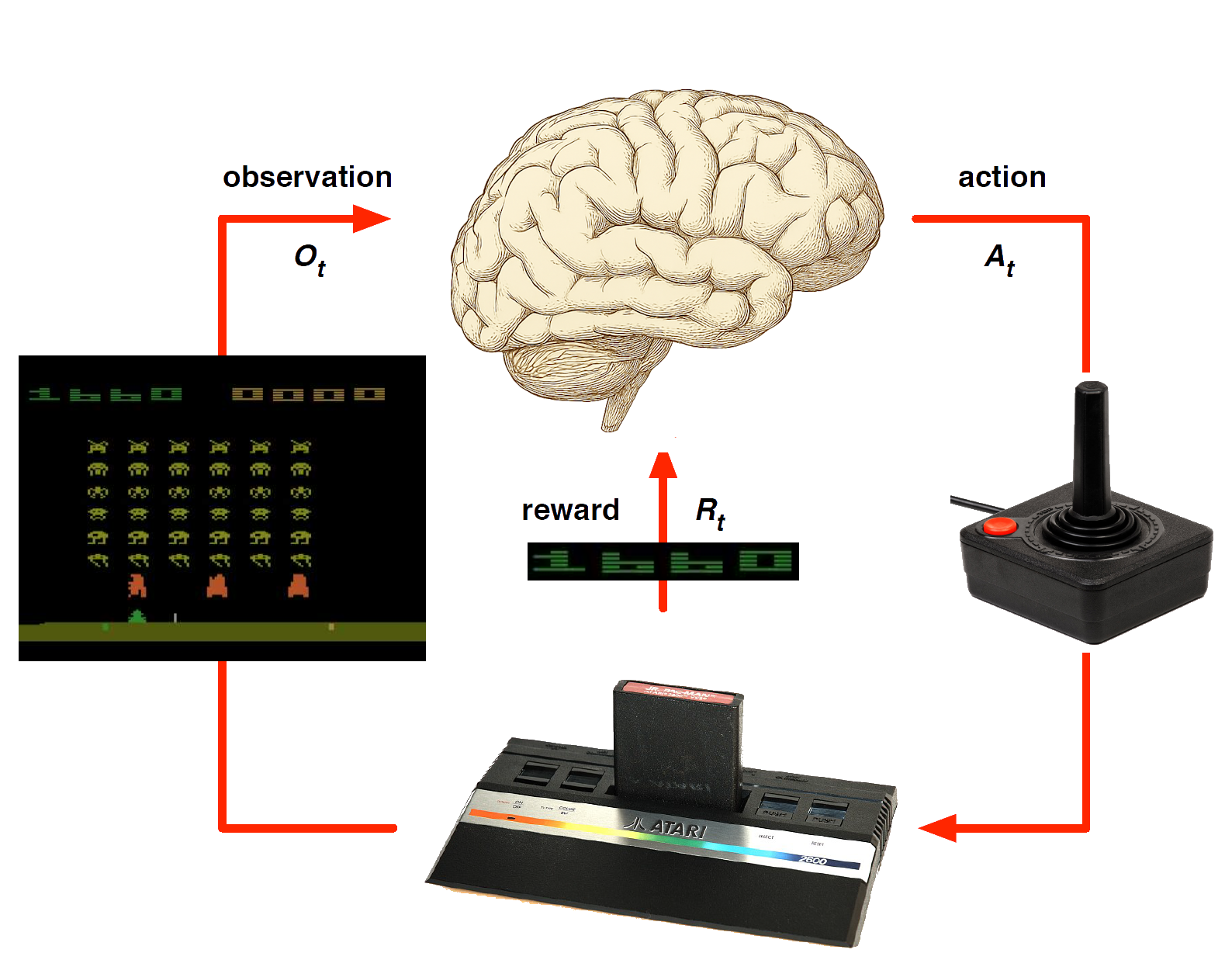
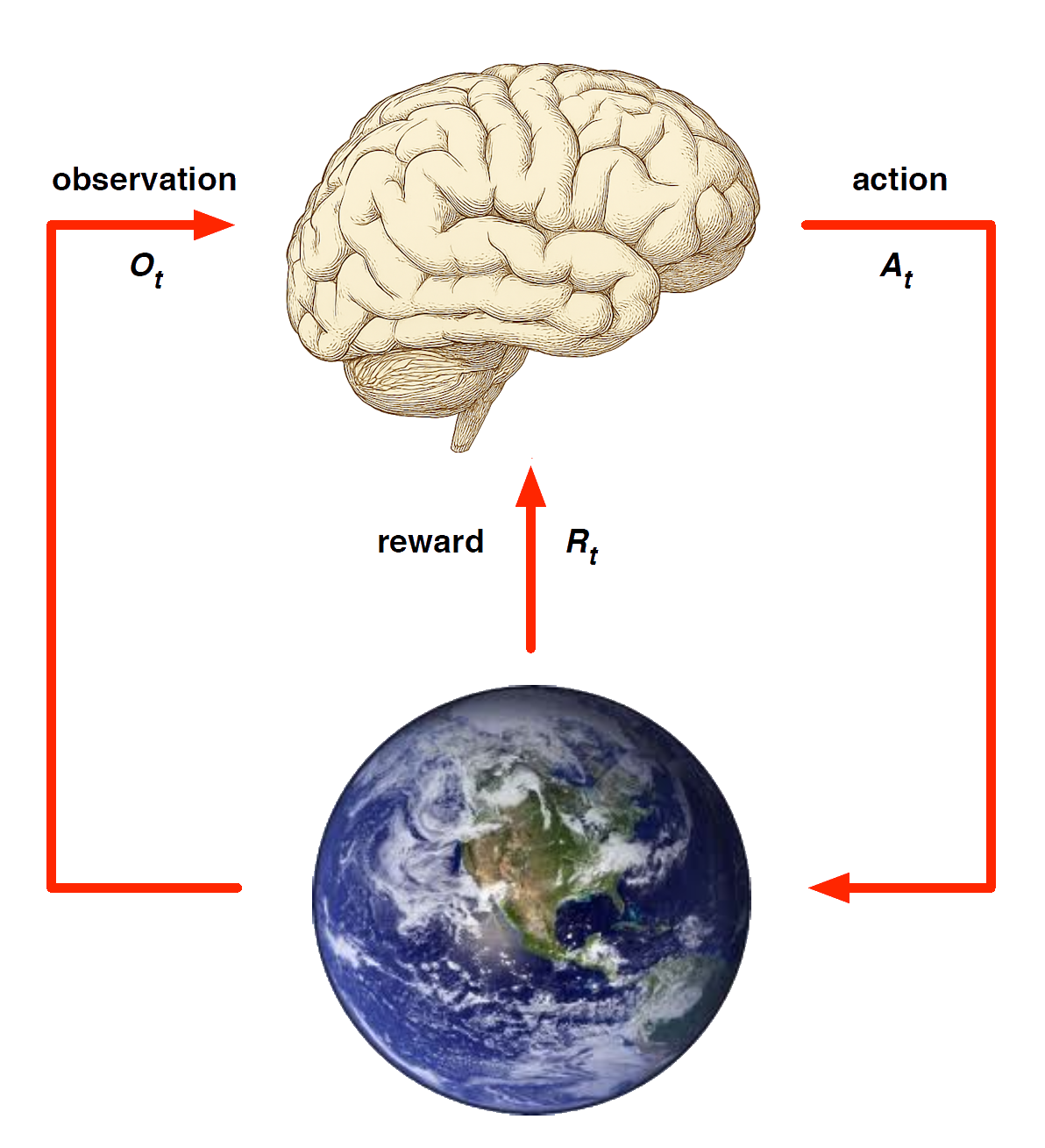
Agent and Environment
At each step \(t\) the agent:
Executes action \(A_t\)
Receives observation \(O_t\)
Receives scalar reward \(R_t\)
The environment:
Receives action \(A_t\)
Emits observation \(O_{t+1}\)
Emits scalar reward \(R_{t+1}\)
\(t\) increments at env. step
Environment State
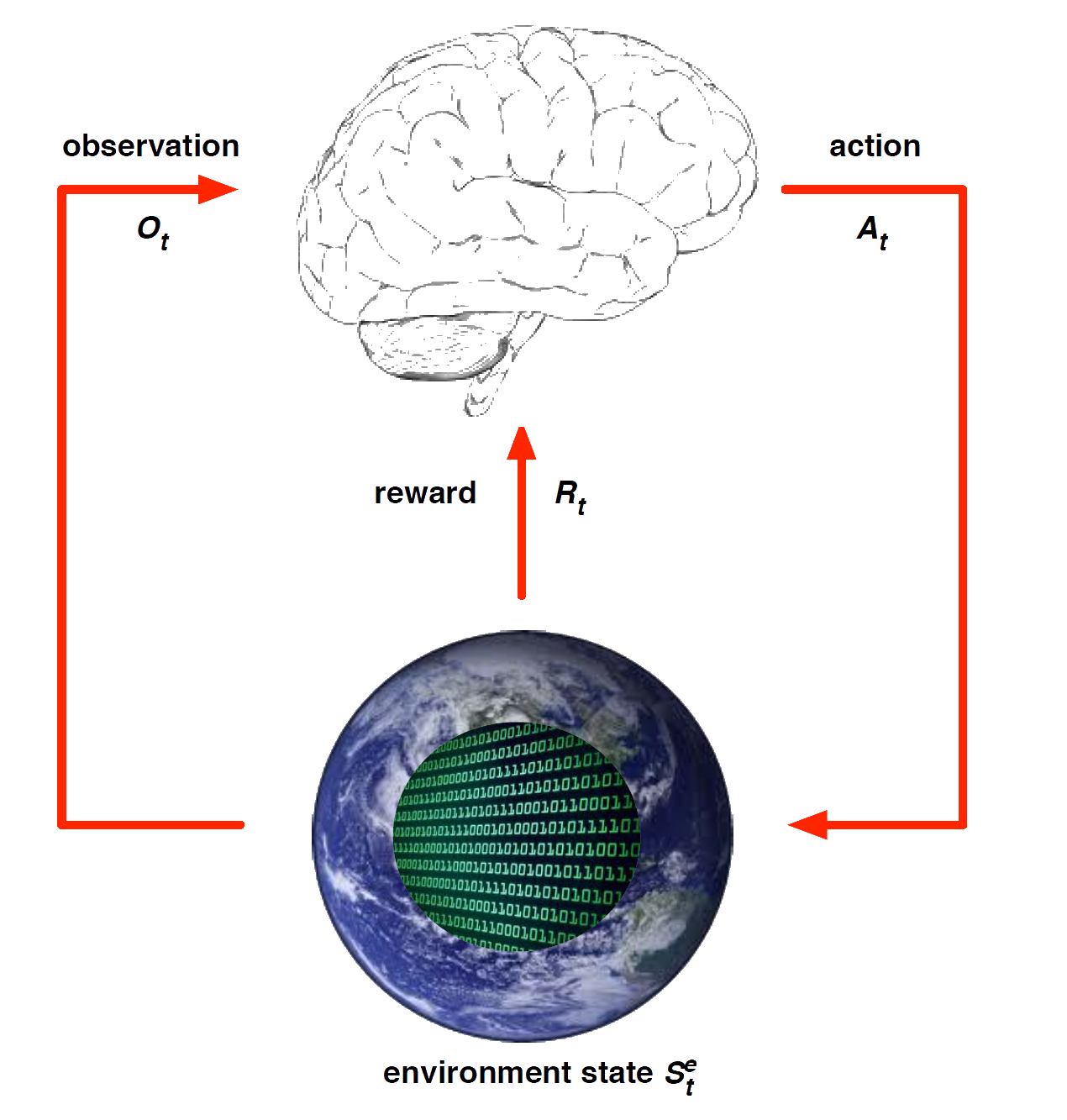
The environment state \(S^e_t\) is the environment’s private representation
- i.e. data environment uses to pick the next observation/reward
The environment state is not usually visible to the agent
- Even if \(S^e_t\) is visible, it may contain irrelevant info
Agent State
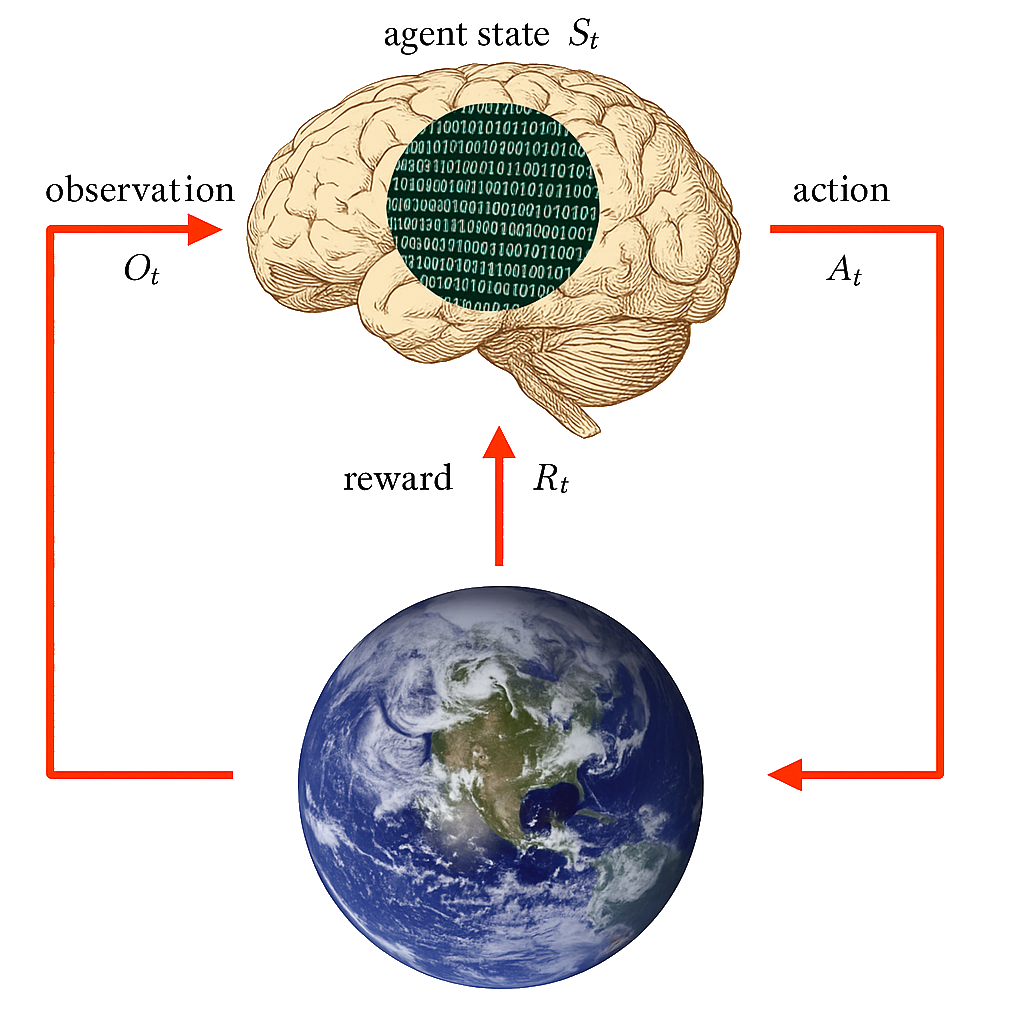
The agent state \(S^a_t\) is the agent’s internal representation
i.e. information the agent uses to pick the next action
i.e. information used by reinforcement learning algorithms
It can be any function of history: \(S^a_t = f(H_t)\)
Rat Example
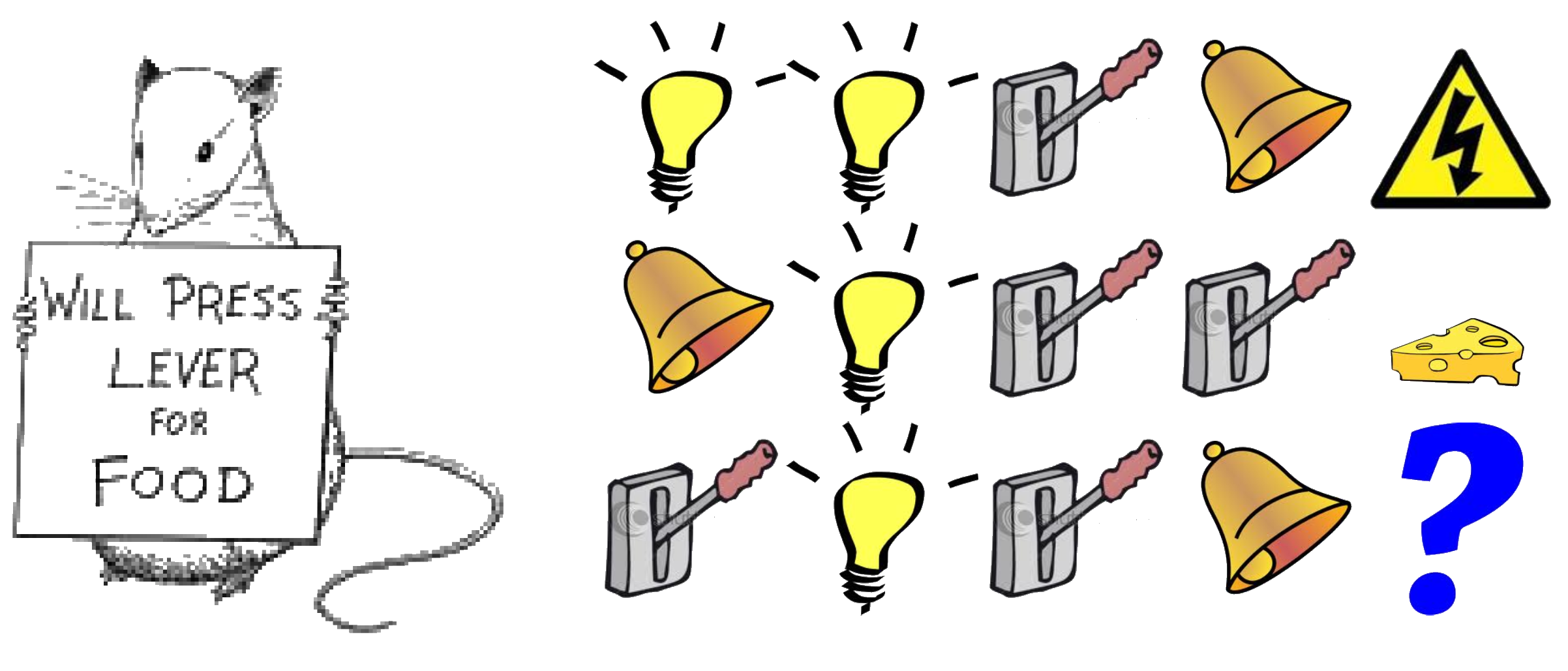
What if agent state = last \(3\) items in sequence?
What if agent state = counts for lights, bells and levers?
What if agent state = complete sequence?
Maze Example
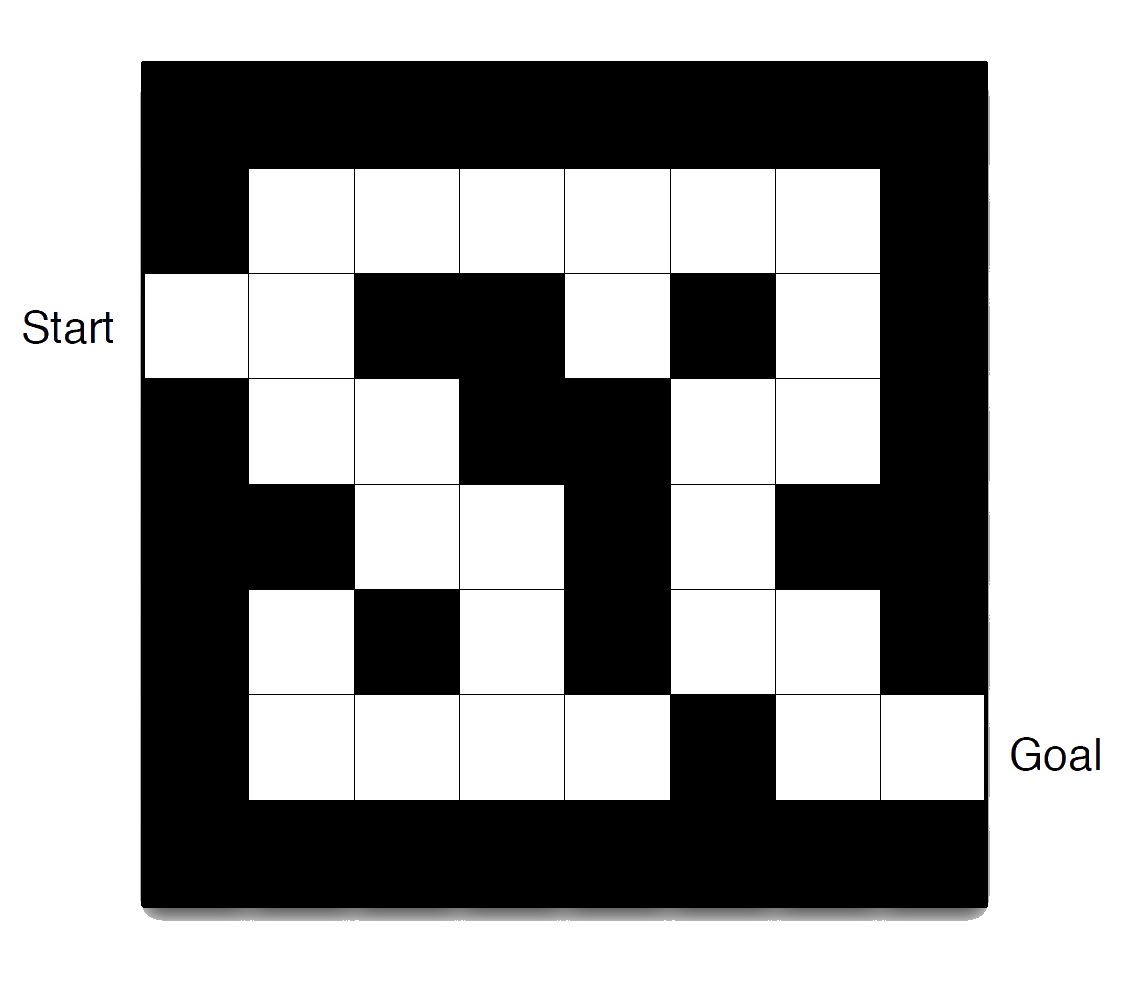
- Rewards: -1 per time-step
- Actions: N, E, S, W
- States: Agent’s location
Maze Example: Policy
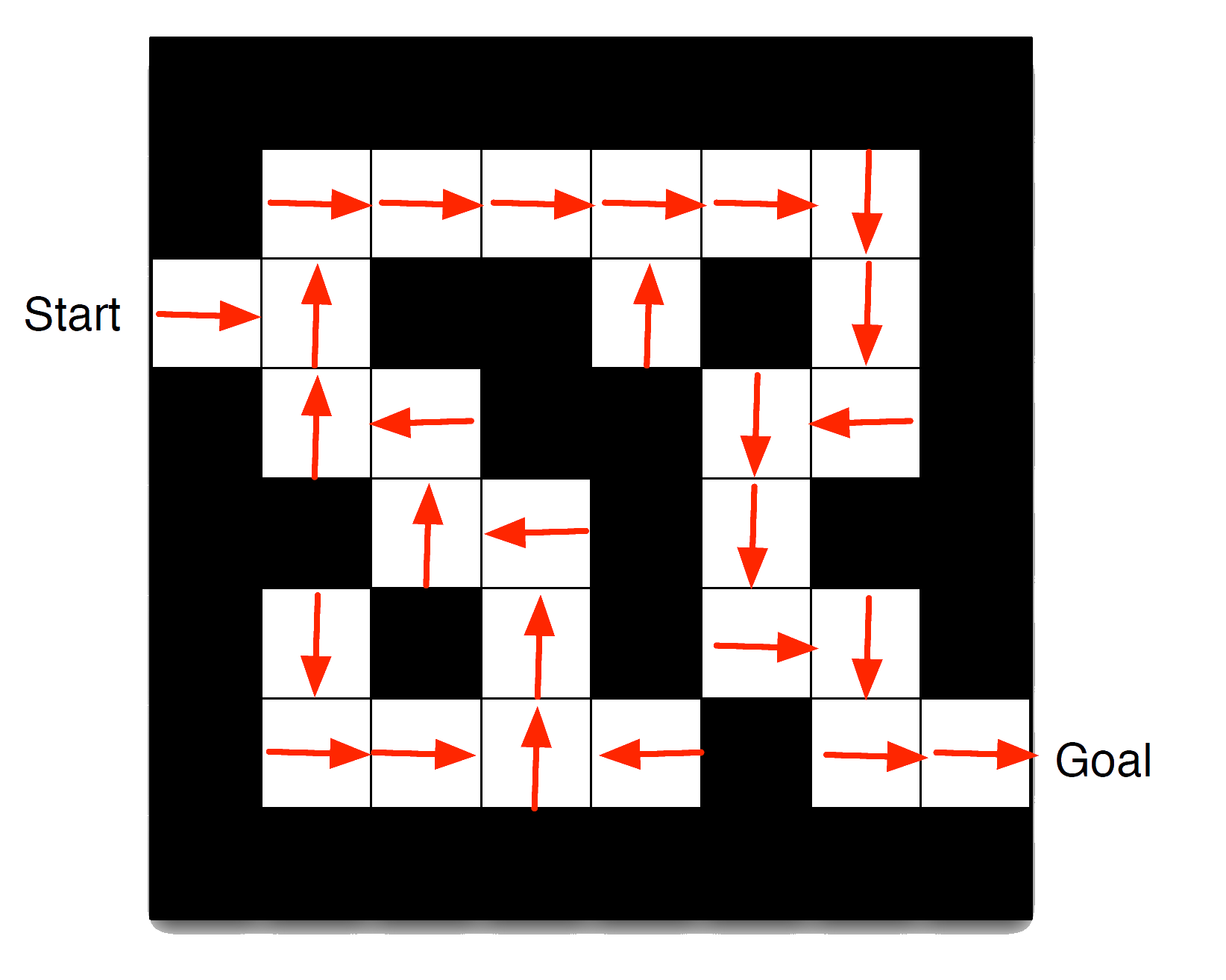
- Arrows represent policy \(\pi(s)\) for each state \(s\)
Maze Example: Value Function
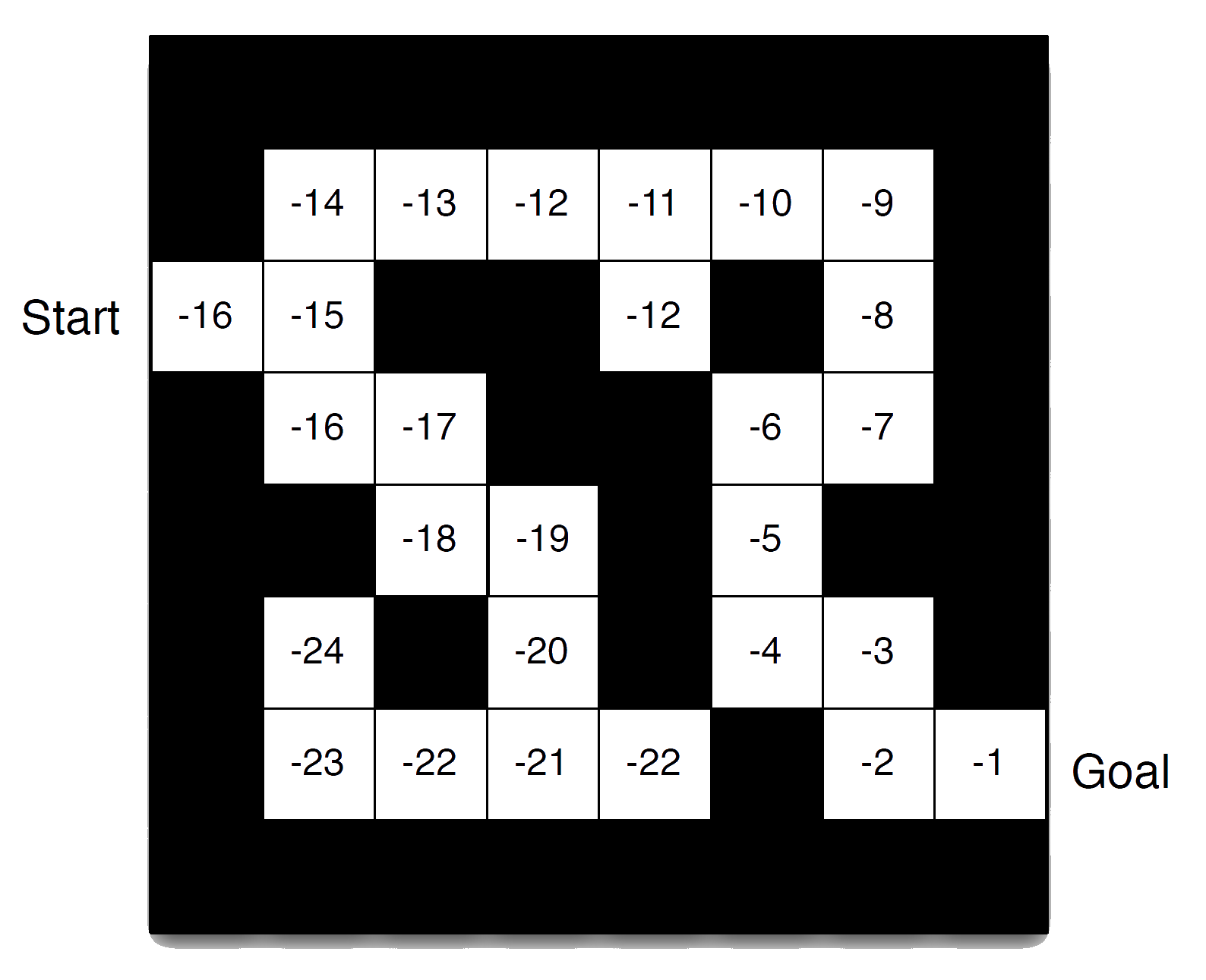
- Numbers represent value \(v_{\pi}(s)\) of each state \(s\)
Maze Example: Model
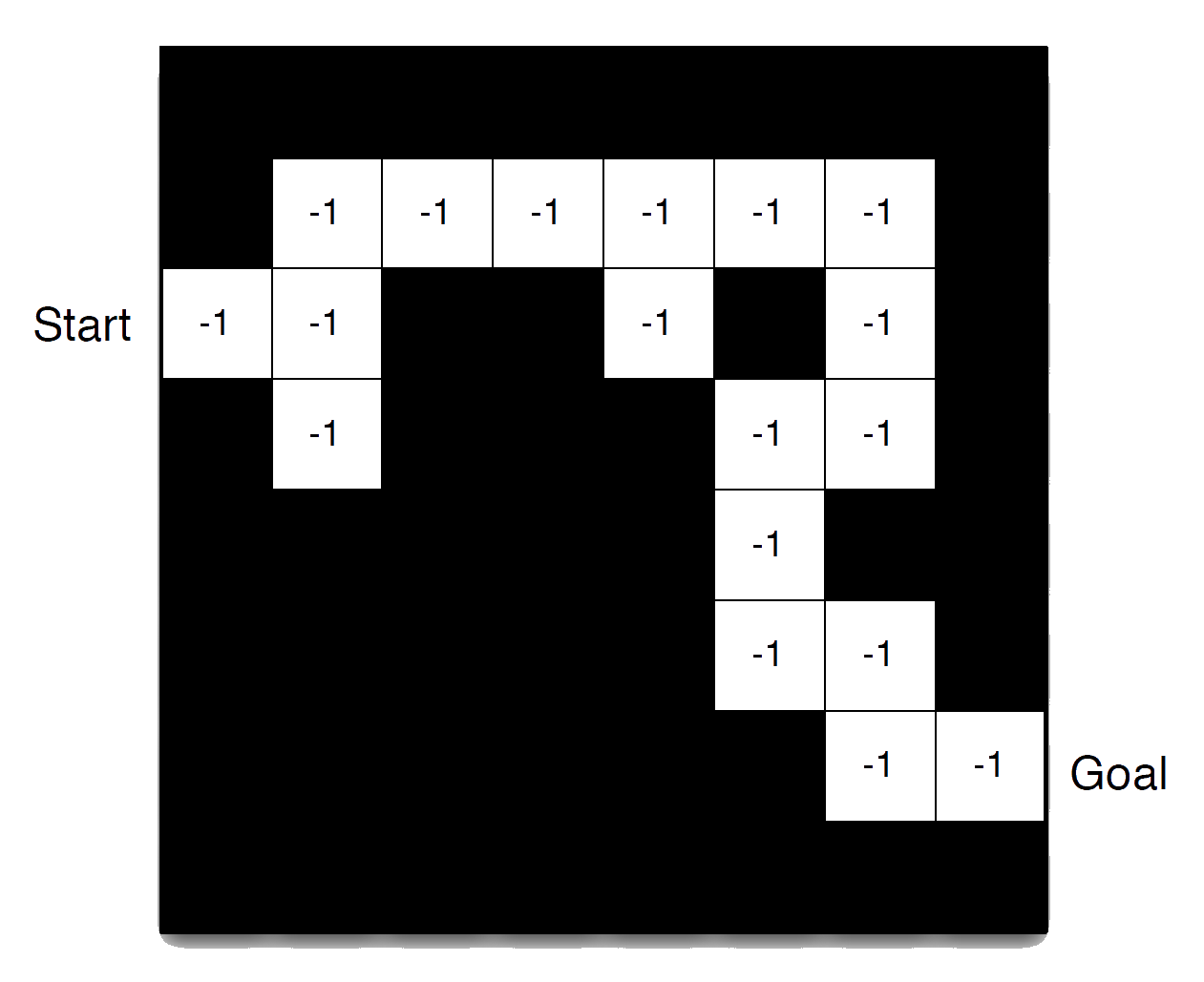
Agent may have an internal model of the environment
Dynamics: how actions change the state
Rewards: how much reward from each state
The model may be imperfect
Grid layout represents transition model \(\mathcal{P}^a_{ss'}\)
Numbers represent immediate reward \(\mathcal{R}^a_s\) from each state \(s\) (same for all \(a\))
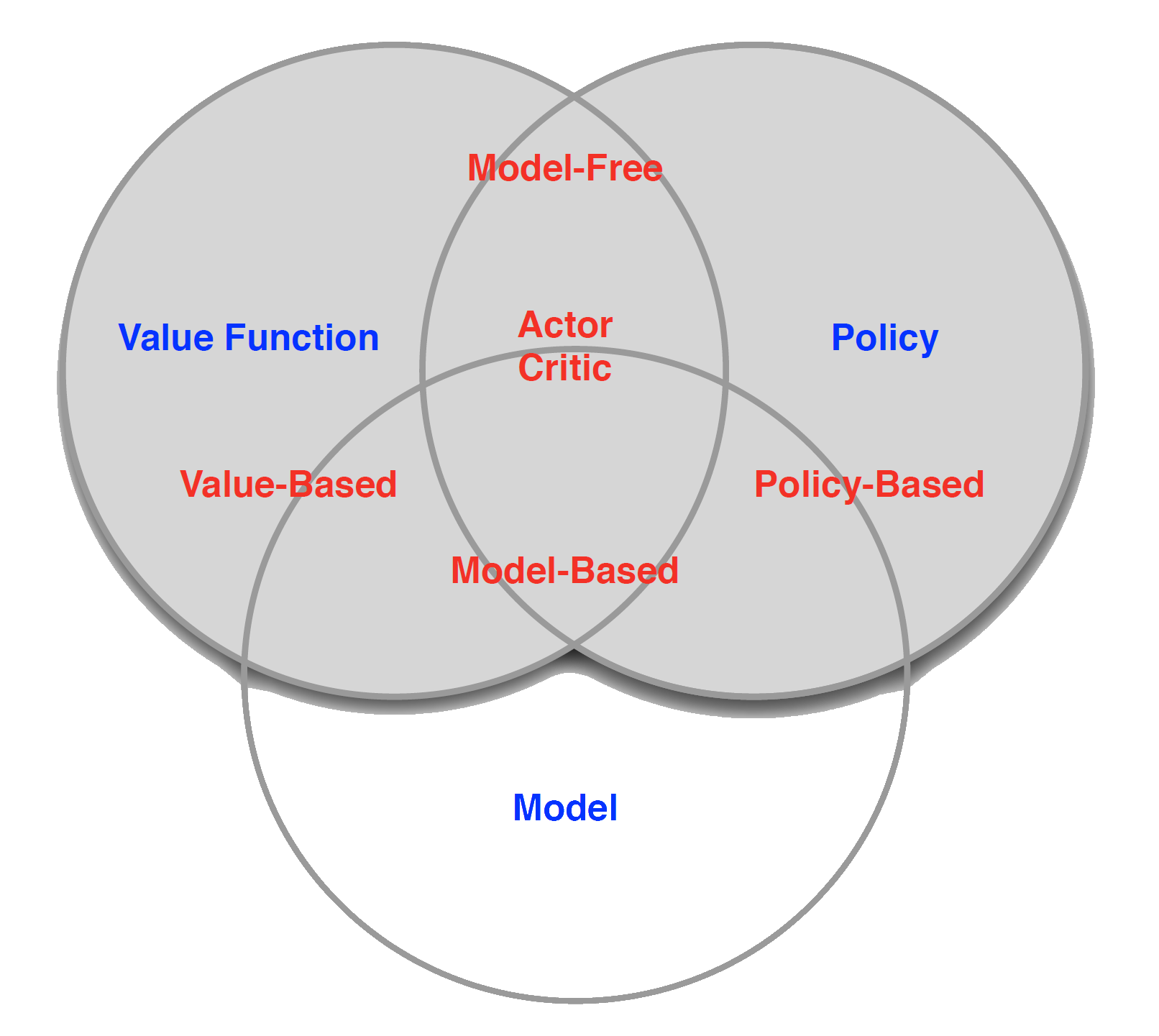
Taxonomy